|
Shape reference frame and bounding boxA shape has a reference frame and a bounding box, as does every object. The shape reference frame however can be relocated, and its bounding box can be modified, without affecting the shape's other properties. The reference frame of selected shapes can be moved in two different ways, via [Edit > Shape reference frame]: The shape's inertia properties are unaffected when its reference frame moves, the inertia matrix and center of mass will however be expressed relative to the new reference frame. The bounding box of selected shapes can be modified in two different ways, via [Edit > Shape bounding box]:
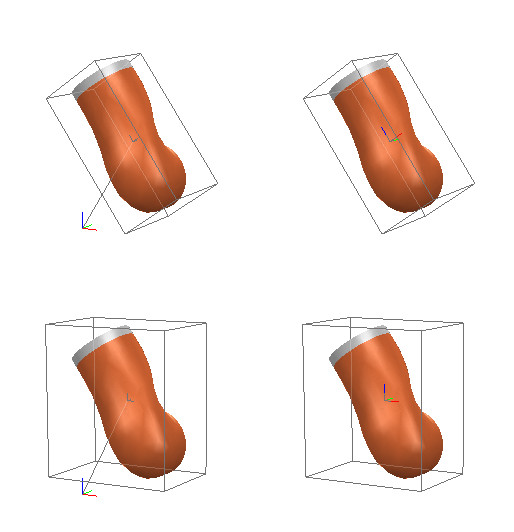
[Possible reference frame locations and bounding box orientations for a shape] Note that the orientation of the bounding box does not need to be the same as the orientation of the reference frame. See also sim.relocateShapeFrame, sim.alignShapeBB, sim.setShapeBB and sim.scaleObject |