|

CoppeliaSim version history
CoppeliaSim versions are indicated as follows:
Version X.Y.Z (rev. W)
Where:
X identifies a special release (once every couple of years)
Y.Z identifies a regular release
W identifies a revision number (mainly for bug fixes)
Version history:
CoppeliaSim V4.6.0 (October 21st 2023)
[Preferred language selection in CoppeliaSim V4.6]
Fixed several bugs. Thanks to Samuel Cavalcanti, Elia Cereda, Keith Siilats, Pardeep Singh Panesar, Zichun Xu, Belal Elsayed and github user mfrigerio17 for noticing them or helping to resolve them
Support for Python has been greatly improved. Embedded scripts now use a new Python wrapper by default: pythonWrapperV2.lua, and the ZeroMQ remote API has been updated. This makes Python code more reactive, faster and easier to program. Differences with Lua scripts have been further reduced to a minimum. Reentrancy is not a problem anymore. Many demo scenes now have a python version.
The CoppeliaSim library itself can now also easily be loaded and called synchronously from a Python script, thus allowing increased speed, flexibility and fine-grained control of the simulation loop.
Switched to a new plugin architecture, allowing API versioning. New plugins now need to be loaded explicitly, via the require directive (e.g. as in simIK = require('simIK')), or via the loadPlugin API function. New plugins can be loaded and unloaded (unloadPlugin) as often as required. Older scripts are supported via an implicit require mechanism.
sim.setThreadAutomaticSwitch is deprecated in favor of sim.setStepping
sim.switchThread is deprecated in favor of sim.step
CoppeliaSim's read-eval-print-loop functionality (via the commander plugin) now allows switching between a Python or a Lua interpreter.
CoppeliaSim's read-eval-print-loop functionality (via the commander plugin) now works also in headless mode, with line editing, history and TAB-completion, via the replxx library.
Command-line option -H now loads the headless version of the CoppeliaSim library.
Added callback function sysCall_thread for Lua too, which is an alternate, convenience function, to creating and handling the main coroutine via code.
Added callback function sysCall_selChange that is triggered when selection changes
execUnsafe is true, execUnsafeExt is false and executeUnsafe is ignored, by default in usrset.txt
Improved the Referenced Handles Explorer add-on
Improved the Joint Tool add-on
Added markdown format support in the 'text-browser' widget of the UI plugin.
Switched to Qt5.15.2 on Ubuntu
CoppeliaSim V4.5.1 (March 29th 2023)
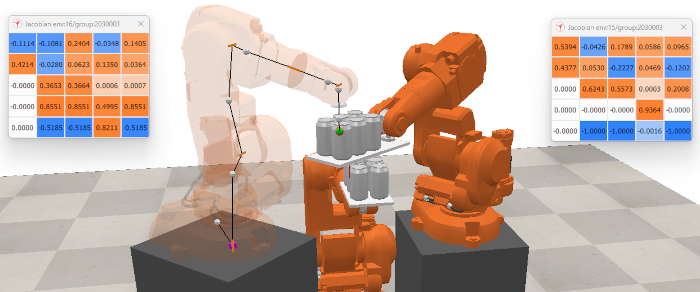
[IK and Jacobian visual debugging in CoppeliaSim V4.5.1]
Fixed several bugs. Thanks to Andrey Voronkov, Vitalii Kudinov, Mathias Thor and Yong Jiang for noticing them or helping to resolve them
Reworked the kinematics functionality, which now allows to handle kinematic tasks in a much more flexible manner. This includes a callback function to inspect/modify/compute the Jacobian, when calling simIK.handleGroup, null-space projection support, or the new function simIK.computeJacobian which allows to compute the Jacobian for any configuration of any kinematic chain
Inverse kinematics worlds can now easily be debugged by adding a visual overlay [Tools > Visualize IK world]. Individual IK group debugging can also be enabled via an optional debug flag in simIK.handleGroup and simIK.handleGroups. A demo scene illustrating this was added: scenes/kinematics/simpleExamples/10-visuallyDebuggingIkGroups.ttt
Added a scene illustrating the null-space projection method with the kinematics functionality: scenes/kinematics/simpleExamples/9-prioritizedGroupsAndNullSpaceProjection.ttt
CoppeliaSim now uses systematically double precision floating point values for the core library, and most plugins. The C API interface is now also in double precision, but one can revert to single precision via the SIM_INTERFACE_SINGLE define
A shape's reference frame can now be relocated while keeping the mesh in place. The reference frame of an imported shape will be always located at the world origin by default. Added sim.relocateShapeFrame and sim.aligneShapeBB
Better rendering of reference frames and bounding boxes
Better rendering of manipulation overlays
Better rendering of numbers in the dialogs
Improved the URDF importer and exporter, making it more flexible and robust
Improved the convex hull, convex decompose and mesh decimation functionality, making it operate also on grouped shapes, while keeping the visual and dynamic properties of the original
Added an option to specify a callback function for simMujoco.composite and simMujoco.injectXML: this allows to dynamically react to a MuJoCo world rebuild event. This is demonstrated in the demo scene: scenes/mujoco/compositeAndOtherCallbacks.ttt
Added simMujoco.removeXML, that allows to remove any previous XML injection or composite.
Added sim.getScriptFunctions, a wrapper function allowing to easily call functions of another script
Fixed and improved the Denavit-Hartenberg add-ons
Rust is now also supported with the ZeroMQ remote API. The binding is courtesy of Samuel Cavalcanti
Added a model for ArUco markers Models/other/aruco marker.ttm and a scene demonstrating detection of markers from a vision sensor: scenes/otherScenes/arucoMarkerDetection.ttt
Added a scene illustrating the IGL plugin: scenes/iglDemo.ttt
New Lua API functions: sim.getLoadedPlugins, sim.getObjectAliasRelative, sim.getScriptFunctions, sim.addReferencedHandle, sim.removeReferencedObjects, sim.visitTree. Various improvements to the Lua standard library
Reorganized the Modules menu (i.e. add-ons)
New add-ons: Find midpoint, Measure distance/direction, Translate to align vertex, Mesh convex hull, Mesh intersection, Mesh union, Mesh difference, Mesh symmetric difference, Mesh subdivision, Joint tool, Event viewer, Broadcast message viewer.
New LDraw plugin and add-on to import ldr/mpd models.
OMPL plugin new functions: simOMPL.createStateSpaceForJoint, simOMPL.setStateSpaceForJoints
Commander plugin: introduced some convenience automatic vars: H, SEL, SEL1, and a function ("apropos") to look up API functions/constants.
IM plugin new functions: simIM.writeToTexture, simIM.getFormat, simIM.getMarkerDictionary, simIM.drawMarker, simIM.detectMarkers
IGL plugin new functions: simIGL.getMesh, simIGL.randomPointsOnMesh, simIGL.sweptVolume, simIGL.exactGeodesic, simIGL.upsample, simIGL.closestFacet, simIGL.uniqueEdgeMap, simIGL.meshBooleanShape, simIGL.centroid, simIGL.barycenter, simIGL.convexHull, simIGL.convexHullShape, simIGL.tetrahedralize, simIGL.intersectWithHalfSpace, simIGL.volume
Eigen plugin new functions: simEigen.pinv
matrix.lua: new Matrix methods: flip, repmat, print, svd, pinv
Some improvements and new functions in the CustomUI plugin.
Minor improvements to the QML plugin.
Code Editor: UI and usability improvements.
URLDrop: new function simURLDrop.openURL.
CoppeliaSim V4.4.0 (September 22nd 2022)
Fixed several bugs. Thanks to Pranav A. Bhounsule, Amirhossein Afkhami Ardekani, Roman Horshkov, Volker Kühn, Artem Shishkin, Mathias Thor and Davide Scorza for noticing them or helping to resolve them
Added a new physics engine to CoppeliaSim: MuJoCo. This adds a state-of-the-art physics engine to CoppeliaSim, enabling new features such as cables, soft body simulation, etc. Added a demo scene illustrating some of MuJoCo's features: scenes/mujocoSpecific.ttt
sim.ruckigPos, sim.ruckigVel, sim.moveToConfig and sim.moveToPose can now also be used for non-symmetric velocity/acceleration profiles, via the sim.ruckig_minvel and sim.ruckig_minaccel flags
The ZeroMQ remote API is now supported in following languages: Python, c++, Matlab, Octave, Lua, Java and Rust
Merged the dynamics dialog with the simulation dialog, and simplified the way custom time steps can be specified
Improved and simplified the script execution/call precedence
Capsule primitives are now also supported
Support for ROS2 Humble Hawksbill was added
Kinematic joints can now also be directly driven via sim.setJointTargetPosition and sim.setJointTargetVelocity, using maximum velocity, acceleration and jerk constraints, for a specific motion profile
Dynamic joints now have distinct and more clearly defined control modes: free, force/torque, velocity, position, spring and custom.
The Rust ZeroMQ remote API is courtesy of Samuel Cavalcanti
Added sim.broadcastMsg, which allows to easily broadcast a message to all scripts
Added a point sampler add-on, that allows to extract 3D poisitions and normal vectors from the mouse cursor
Added a scene demonstrating texture modification to simulate a vehicle's trace: scenes/mobileRobotVisualTraces.ttt
Added a model of the ABB YuMi: Models/robots/non-mobile/ABB YuMi.ttm
Added a model of the Mirobot: Models/robots/non-mobile/Mirobot.ttm
Added a model of a generic tray: Models/equipment/generic tray.ttm
Added a model of a generic external wall: Models/infrastructure/walls/external wall.ttm
Added a model of a generic soft body: Models/other/soft body.ttm
Added a scene illustrating gears (or joint dependencies) with Mujoco and Vortex: scenes/gears.ttt
CoppeliaSim V4.3.0 (January 27th 2022)
Fixed several bugs. Thanks to Nathan Kocherhans, René Simon, Yongdong Wang, Andrés Faíña, Eric Rohmer, Davide Scorza, Jovan Sumarac, Luigi Ascione, Cameron Kabacinski, Rui Li, Patrick Grüner, Andrés Faíña, Michal Mareš, Kat Styles Wood, David Paulius and Alex Wuqi Zhang for noticing them or helping to resolve them.
Python is now also supported next to Lua, as a programming language for CoppeliaSim scripts. Both operate in almost the same fashion, except for small differences. See also the example scenes scenes/simplePythonExample.ttt, scenes/controlTypeExamples/controlledViaScript.ttt and scenes/trajectoryAndMotion/ruckigOnlineTrajectoryGeneratorExample-pythonAndLua.ttt
Objects are now identified via a path and an alias, instead of a unique object name, as was the case in previous versions: this allows for a safer and more flexible object access, by specifying absolute or relative paths, e.g. sim.getObject("./descendentObject"). This also means that object aliases (i.e. formerly names), do not need to be unique anymore. See also sim.getObjectAlias and sim.setObjectAlias.
Added a plugin wrapping the Ruckig Online Trajectory Generation library, courtesy of Lars Berscheid. It acts as a drop-in replacement for the Reflexxes Motion Library type 4, and thus also offers the jerk limitation functionality. Functionality is available via sim.ruckigPos, sim.ruckigVel, sim.ruckigStep and sim.ruckigRemove.
Added a WebSocket interface plugin.
Added a remote API based on ZeroMQ, currently however only fully implemented in Python and C++. Compared to the legacy remote API, it is very easy to use, lightweight, and supports the exact same API functions that are availabe via scripts: this includes all regular API functions (i.e. sim.* -type functions), but also all API functions provided by plugins (e.g. simOMPL.*, simUI.*, simIK.*, etc.)
Added several new callback functions: sysCall_event and sysCall_ext. sysCall_event in particular allows to keep track of most changes happening in a CoppeliaSim scene, and allows to easily implement external renderers, etc. See also next item.
Added a web-browser based front-end.
Added sim.registerScriptFuncHook, which allows to set up function hooks to be executed before or after a specific function, namely also (system) callback functions.
Object's renderable flags are now ignored by vision sensors: instead, vision sensors will render object in the same way as do cameras, by only taking into account their visibility state: this ends some confusion, but can lead in some situations to a different behaviour and result. Flexibility is however still guaranteed, with the ability to use a collection as renderable entity, which can override object's visibility states.
Added an add-on that allows to record animations from any selected object/model: Animation capture
Added sim.generateTextShape and an add-on that allows to generate and edit 3D text: 3D text generator. The add-on is courtesy of Mechatronics Ninja
Added an add-on that can import floor-plan images to 3D shapes: Floor plan importer.
Added an add-on that allows to quickly check for self-collisions, collisions with the environment, or collisions between two entities: Collision check.
Added an add-on that allows to quickly measure distances between an entity and the environment, or between two entities: Distance check.
Added an URDF export add-on: URDF exporter.
Added a model of the Franka Emika gripper, courtesy of Alexander Oliva
Added sim.moduleEntry that allows to handle menu entries in the Modules tab. When selected, the corresponding script will have its sysCall_moduleEntry callback function triggered.
Added sim.getShapeBB and sim.setShapeBB to be able to scale shapes more conveniently
Added the possibility to transform/distort vision sensor images via a function using pixel remapping: simVision.distort. See also the related demo scene in scenes/vision/imageProcessingDemo2.ttt
Added an example model of a Stewart platform: Models/robots/non-mobile/Stewart platform.ttm
Added an example scene of IK and obstacle avoidance: Scenes/kinematics/obstacleAvoidanceAndIk.ttt
Added an example scene of a mobile robot doing path planning: Scenes/pathPlanning/mobileRobotPathPlanning.ttt
Added an scene that illustrate's the relationship of CoppeliaSim's Euler angles convention (alpha-beta-gamma) and the yaw-pitch-roll Euler angles convention: Scenes/eulerAngles.ttt
Added an example scene illustrating IK movement via the remote API: scenes/messaging/ikMovementViaRemoteApi.ttt. Related Python scripts can be found in programming/zmqRemoteApi/clients/python/ and in programming/remoteApiBindings/python/python/
Added a simple button-click action tool: Models/tools/button action tool.ttm
Added a Qt QML plugin.
Added an IGL plugin, for boolean operations on shapes.
Added a subprocess plugin, for launching and handling subprocesses.
CoppeliaSim V4.2.0 (April 6th 2021)
Fixed several bugs. Thanks to Adrian Schoisengeier, Mathias Thor, Francisco Marin, Nikita Aigner, Charles Han, Shai Levy, Bobovsky Zdenko, Salvatore Sessa, Jakob Ambsdorf, Hayato Amaike, and Kevin Thomas for noticing them or helping to resolve them.
All script types now support threaded or non-threaded operation. Threaded operation is handled via coroutines that are preemptively interrupted by CoppeliaSim. Except for its code, there is no difference anymore between a threaded and non-threaded script. Old threaded child scripts are still supported for backward compatibility, but CoppeliaSim will try to automatically convert them. If this is not desired, adjust value keepOldThreadedScripts in system/usrset.txt.
Switched from Lua 5.1 to Lua 5.3. Backward compatibility should normally be maintained, except maybe for old Lua modules you might be using. If this is the case, update those module to their Lua 5.3 counterparts. Read also about the language incompatibilities introduced in Lua 5.2, and the language incompatibilities introduced in Lua 5.3. Additional backward compatibility code can be communicated to us and added to lua/sim.lua.
The ROS2 interface is now also supported on Windows.
Since this release, static IK groups (i.e. created via the GUI) are deprecated in favor of dynamically created IK groups, which offer much more flexibility. Read more about the kinematics functionality here.
Added the convenience function simIK.addElementFromScene allowing to quickly generate an IK element from a kinematic chain in the scene
Added simIK.duplicateEnvironment: useful when operating on an IK environment while leaving the original environment unchanged. Also added simIK.save.
Kinematic example scenes in folder kinematics have been reworked and simplified.
Added simIK.generatePath and a related demo scene: scenes/kinematics/ikPathGeneration.ttt
Rewrote the inverse kinematics tutorial.
Rewrote and reorganized large parts of the user manual.
Since this release, static collections (i.e. created via the GUI) are deprecated in favor of dynamically created collections, with new API functions. This results in much more flexibility. Read more about collections here.
Since this release, static collision objects (i.e. created via the GUI) are deprecated in favor of sim.checkCollision. Read more about collision detection here.
Since this release, static distance objects (i.e. created via the GUI) are deprecated in favor of sim.checkDistance. Read more about distance calculation here.
Since this release, graph streams and curves created via the GUI are deprecated in favor of streams/curves created and manipulated via new API functions. This allows a much more flexible and precise control of graphs. Read more about graphs here.
Since this release, path objects are implemented in a generic manner, via a pseudo path objects. This allows much more flexibility. Read more about paths here, and have a look at the simple example scene scenes/movingAlongAPath.ttt.
Added a CoppeliaSim linear algebra library.
Added a ZeroMQ interface plugin.
Added new conveyor models, allowing to easily create conveyor systems of any size/shape. See models in Models/equipment/conveyors.
sim.getShapeMassAndInertia and sim.setShapeMassAndInertia are deprecated, and replaced by sim.getShapeMass, sim.setShapeMass, sim.getShapeInertia and sim.setShapeInertia.
Added a new demo scene illustrating smooth movement profiles in forward and inverse kinematics mode: kinematics/smoothMovementsInFkAndIk.ttt
Updated the OMPL plugin to use the OMPL library version 1.5.0
Added simIK.getAlternateConfigs and sim.getAlternateConfigs, to be used in conjunction with simIK.getConfigForTipPose, when dealing with manipulators that have joint ranges larger than 360 degrees, to generate alternative configurations.
Added several path-related API functions, including sim.generateTimeOptimalTrajectory that allows to generate time optimal trajectories (i.e. trajectories that respect velocity and acceleration constraints), based on the TOPP-RA library. A demo scene related to that can be found in scenes/trajectoryAndMotion/pathToTrajectory.ttt.
Added a SVG widget for the CustomUI plugin. Content can be loaded from file, from XML string, or embedded in the UI XML.
sim.rmlMoveToJointPositions and sim.rmlMoveToPosition are deprecated in favor of sim.moveToConfig and sim.moveToPose, which feature a callback mechanism for maximum flexibility.
Added following API functions: sim.isDynamicallyEnabled, sim.getJointDependency, sim.changeEntityColor and sim.restoreEntityColor.
Following Docker image is available for running CoppeliaSim in a container: docker-image-coppeliasim
The default scene will now pause simulation when a script error is raised.
The Windows installer/uninstaller can now silently operate by invoking it with following command-line arguments: /silent /hide /[silent]=true
CoppeliaSim V4.1.0 (July 21st 2020)
Fixed several bugs. Thanks to Jakub Turaj, Rieky Barady, Jian Ye, Jaime Boal, Mathias Thor, Pável Axel Mc Campos Peña, Filipe Rocha, Patrick Gruener, Thomas Wilmotte, Lorenzo Romanini, Pablo Bustos, Sonny Tarbouriech, Johan Relefors, Adrian Schoisengeier, Arturs Paugurs, Wei Wei, David Page, Ayush Patel, Aleksander Sil and Cameron Kabacinski for noticing them or helping to resolve them.
Ubuntu20.04 support
Switched to Qt5.15.0 and VC2019 on Windows.
CoppeliaSim's kinematics functionality (i.e. forward and inverse kinematics) is now also available via Lua scripting: this means that instead of creating and handling kinematics tasks via the GUI, one can also entirely create and handle them programmatically in a very flexible manner. Two example scenes illustrate this: scenes/kinematics/8-computingJointAnglesForRandomPoses.ttt and scenes/kinematics/9-programmaticallySettingUpIk.ttt
CoppeliaSim's collision detection and minimum distance calculation functionality on shapes, OC-Trees and point-clouds is now also available via Lua scripting: you can now also perform the same kind of calculations without the need of creating any scene object or modifying the scene content. This is illustrated in following example scene: scenes/sceneObjectIndependentGeometricCalculationExample.ttt
ROS2 Interface plugin for ROS2 Foxy Fitzroy, supports topics, services, actions, params, TF2 broadcast and image transport.
GLTF plugin can export static scene and animations in the GLTF 2.0 format. The functionality is available via the add-on menu, or via related API functions.
URL Drop plugin allows loading scene from remote locations via drag and drop (e.g. drop an URL from a browser's window).
The verbosity level (console, status bar and simple dialogs) can now be adjusted from the command line with the -v , -w and -x arguments. To output messages, plugins should now use simAddLog and scripts sim.addLog.
An optional Lua script string may be executed via the command line with the -c argument.
Added an example scene illustrating simple motor controllers: scenes/motorControllerExamples.ttt
Added an example scene illustrating how to apply inverse kinematics to dynamically enabled models/manipulators: scenes/kinematics/10-applyingIkToDynamicallyEnabledModels.ttt
Added an example scene illustrating simple usage of the Reflexxes Motion Library: scenes/reflexxesMotionLibraryExamples.ttt
Added sim.setJointTargetForce and sim.getJointTargetForce. sim.setJointForce is now deprecated.
Added sim.yawPitchRollToAlphaBetaGamma and sim.alphaBetaGammaToYawPitchRoll, to convert between those two different Euler angle representations.
The true headless CoppeliaSim library is also shipped (i.e. coppeliaSimLibHeadless.dll or similar). This is in addition to the headless mode supported via the -h command line option, which simply suppresses all GUI elements of the regular CoppeliaSim library.
Fixed a few shape export problems (i.e. normals and/or textures)
A Simulink-CoppeliaSim communication plugin is now available, courtesy of Diego Daniel Santiago.
Many CoppeliaSim video tutorials courtesy of Leopoldo Armesto.
CoppeliaSim V4.0.0 (November 26th 2019)
We discontinued development of V-REP. Instead, we focus our efforts on CoppeliaSim. CoppeliaSim is 100% compatible with V-REP (i.e. it is a fork of the V-REP project). It runs faster and has more features than V-REP. Of course will Coppelia Robotics handle V-REP support and licenses in a perfectly interchangeable manner with CoppeliaSim support and licenses.
Fixed several bugs. Thanks to Mark Hartenstein, Stephen James, Simon Birrell, Sahil Sharma, Adrian Schoisengeier, Rémi Lux, Kilian Freitag, Maël Hörz and Eric Rohmer for noticing them or helping to resolve them.
Completely rewrote the calculation routines handling collision detections, minimum distance calculations, proximity sensor simulations, OC trees and point clouds. A significant speed increase could be achieved. The routines are now grouped in the geometric plugin. The core of the geometric plugin are the Coppelia geometric routines, available for stand-alone applications.
You can now import and export XML files.
You can now from within the script editor open the API documentation for the function/constant under the mouse pointer, via the context menu.
Switched to Qt5.12.5 on all 3 platforms.
Added support for ROS 2 via ROS2Interface. See the compiledRosPlugins folder, and the ROS2 Interface source code. Have also a look at ROS 2 API and the ROS 2 tutorial.
Vision sensor filters are no longer supported. They are replaced by vision callback functions, which allow for a much more flexible operation. Old scenes are automatically updated. A demo scene illustrating the new way to handle image processing was added: imageProcessingDemo.ttt.
Added trigger callback functions for vision sensors, proximity sensors, and force/torque sensors.
Added user config callback functions, which allow implementing custom behaviour upon double-clicking user parameter icons.
Added an add-on for exporting scene content as glTF data: simAddOnGLTFExporter.lua
The simOpenGL3 renderer can now also be selected as renderer for cameras, during simulation.
Added the model of the Franka Emik Panda robot, courtesy of Alexander Oliva, Marco Cognetti and Claudio Gaz.
CoppeliaSim simulations can be exported to Blender via Boris Bogaerts' CoppeliaSim-Blender-Tools.
RLBench is an ambitious large-scale benchmark and learning environment designed to facilitate research in a number of vision-guided manipulation research areas, including: reinforcement learning, imitation learning, multi-task learning, geometric computer vision, and in particular, few-shot learning. RLBench, built around PyRep and CoppeliaSim, is created by Stephen James.
Added a model of the Niryo One robot.
V-REP V3.6.2 (June 26th 2019)
Fixed several bugs. Thanks to Jacob Smith, Mohsen Moradi Dalvand, Simon Birrell, Mathias Thor, Jedrzej Orbik and Liu Dong for noticing them or helping to resolve them.
PyRep, built on top of V-REP and courtesy of Stephen James (Imperial College London), is a Python toolkit for robot learning research. Compared to the remote client approach, it displays great speed improvements since remote procedure calls or synchronization are not required. This makes PyRep the perfect solution for learning algorithms in the areas of reinforcement learning, imitation learning, state estimation, mapping, and computer vision.
V-REP now also offers shadows support with vision sensors, when rendering via the simOpenGL3 plugin, courtesy of Stephen James (Imperial College London). See also the updated rendererDemo.ttt scene.
The sandbox script is now loaded from system/sndbxscpt.txt at start-up, and can contain similar callback functions as add-ons.
Named command-line arguments are now supported via the -G option. Those can be queried (e.g. by plugins) via sim.getNamedStringParam.
V-REP V3.6.1 (March 15th 2019)
Fixed several bugs. Thanks to Julian Mayer and Boris Bogaerts for noticing them or helping to resolve them.
Switched to Qt5.12.1 on all 3 platforms
Added API functions simApplyTexture, sim.setJointDependency and sim.getStackTraceback.
The shape import/export functionality is now handled by a V-REP Plugin (simAssimp), based on the Assimp library. See here for the new API functions.
URDF and SDF files are now loaded with textures (if present)
V-REP V3.6.0 (February 15th 2019)
Fixed several bugs. Thanks to Leon Masopust, Michael Tong, Zhengxing Yang, Lenka Pitonakova, Thomas Gurriet, Hervé Frezza-Buet, Justus Rijke, Stefan Müller, Julien Lechalupe, Tristan Gahler, Robert Peck, William Jones, Benjamin Erdemann, Ulrich Viereck, Joachim Haensel and Justus Rijke for noticing them or helping to resolve them.
Script execution/calling order has been adjusted, for a more consistent and overall logical behaviour. This may have an impact on how a simulation runs in certain situations.
Dynamics callback functions have been implemented and are supported in child scripts and customization scripts.
Added a system callback function for customization scripts and add-ons that allows, during simulation, to control the execution of the main script: sysCall_beforeMainScript. This is useful to easily implement step-by-step simulation, or to easily synchronize the simulation with an external application.
Added a simple script debug functionality that allows to monitor function calls and watching variables.
The commander now has dynamic variable completion, history, explicitly prints any variable, etc. Type help() for details.
Added following API function: sim.getPersistentDataTags.
The Open Mesh plugin for V-REP now uses the latest OpenMesh library (V6.3) on all 3 platforms
Added a MessagePack module for Lua: lua-MessagePack, courtesy of Francois Perrad.
Added a MessagePack encoder/decoder for C/C++: msgpack-c, courtesy of Takatoshi Kondo and several others.
Added a MessagePack encoder/decoder for Matlab: matlab-msgpack, courtesy of Bastian Bechtold.
Added a MessagePack encoder/decoder for Java: msgpack-java, courtesy of Sadayuki Furuhashi and several others.
Added a CBOR encoder/decoder for Lua: Lua-CBOR, courtesy of Kim Alvefur.
Added sim.getRandom, math.random2 and math.randomseed2 in order to provide individual random number generators for each script (math.random and math.randomseed share the same generator, independent of which script is calling)
The script editor functionality is now provided via a plugin: simCodeEditor. It allows to easily search/replace, do/undo, jump to specific functions, restart a script, offers non-modal customization script edition, etc. Code included via the require directive can automatically be opened and modified via the popup menu. You can temporarily revert to the old script editor functionality by adjusting variable useOldCodeEditor in file system/usrset.txt.
Added sim.textEditorOpen, sim.textEditorClose, sim.textEditorShow and sim.textEditorGetInfo
A VR interface for V-REP was developed by Boris Bogaerts. It can visualize any V-REP scene in steamVR (openVR) compatible VR devices and return user manipulations to V-REP. Installer files are available here (no compilation required, windows only). Instructions on how to use the interface are provided here.
A ROS-enabled e-puck, courtesy of Andrei Florea and Catalin Buiu, was added to the model library. More details can be found here.
V-REP V3.5.0 (February 6th 2018)
Fixed several bugs. Thanks to Steffen Hemer, Fangyi Zhang, virgile Daugé, Riccardo Spica, Filipe Rocha, Jacob Huesman, Matthew Veres, Robert Lang and Florian Golemo for noticing them or helping to resolve them.
Switched to Qt 5.9.0 LTS on all platforms.
From within a script, print() now prints to the status bar, instead of the console. This can be reverted with print=printToConsole. printf() is now also supported. Both, print and printf will now also print the content of tables.
Added a commander plugin (read-eval-print loop), that adds a text input to the V-REP status bar, which allows entering and executing Lua code on the fly, like in a terminal. The code can be run in the sandbox script, or any other active script in V-REP
Moved all the source code items related to V-REP to github.
Switched to a cleaner way of calling script code, by using predefined functions (e.g. sysCall_init, sysCall_actuation, etc. Scripts should now contain nothing else than functions anymore. The old way of calling scripts is however still supported for the sake of backward compatibility (but make sure not to mix both methods).
New joint callback functions have been implemented and are supported in child scripts and customization scripts. The old joint control callback script functionality should not be used anymore and is not accessible anymore via the GUI, but is still operational (you can temporarily make it accessible again via enableOldJointCallbackScriptEdition in system/usrset.txt)
A new contact callback function has been implemented and is supported in child scripts and customization script. The old contact callback script functionality should not be used anymore and is not accessible anymore via the GUI, but is still operational (you can temporarily make it accessible again via enableOldCustomContactHandlingEdition in system/usrset.txt)
New widgets and API functions were added to the custom UI.
Updated the content of v-repNotepad++.zip, which contains all V-REP-related calltips and syntax highlighting keywords for Notepad++.
Added sim.getShapeViz, that allows to retrieve a shape's mesh and texture information
Added a tool that allows to step through a simulation by triggering each individual simulation step. Can also be used in replacement of the remote API or ROS synchronous mode. The tool is located in Models/tools/simulation stepper tool.ttm.
Added a vision sensor model that extracts 3D positions from blob detections: Models/components/sensors/Blob to 3D position.ttm.
Added a plugin that wraps the LibICP (Library for Iterative Closest Point Matching, by Andreas Geiger)
Added a plugin that wraps the OpenCV library, offering basic image processing and drawing functionality
Broke compatibility of the simExtSurfaceReconstruction_reconstruct API function, which was replaced with simSurfRec.reconstruct_scale_space.
Added support for shared memory communication in the legacy emote API. The code is courtesy of Benjamin Navarro. By specifying a negative port number, shared memory will be used instead of socket communication.
Added following API functions: sim.executeScriptString, sim.getApiFunc, sim.getApiInfo, sim.setPluginInfo and sim.getPluginInfo.
A Lanelet plugin for V-REP was developed by Cándido Otero, available here.
Modern Robotics: Mechanics, Planning, and Control, a new textbook by Prof. Kevin M. Lynch and Prof. Frank C. Park is available for free download here, and also available for purchase as hardback copy. Several V-REP examples and scenes are available here.
V-REP V3.4.0 (April 6th 2017)
Fixed several bugs. Thanks to Sven Schweigler, Nicola Battilani, Mark Edmonds, Benno Timmermann, Cándido Otero Moreira, Graeme Neff Wilson, Justin Yim, Allen Zhu, Leo Koppel, Ravi Prakash Joshi, Sina Radmard, Sai Vemprala, James Barger, Gonzalo Casas, Metehan Doyran, Arif Rahman and Jason Cachrane for noticing them or helping to resolve them.
For the Windows version of V-REP, switched to Qt 5.6.2, MSVC2015 and 64bit. Make sure to desinstall previous V-REP versions explicitly in folders program files (x86)/V-REP3/V-REP_PRO, program files (x86)/V-REP3/V-REP_PRO_EDU and program files (x86)/V-REP3/V-REP_PLAYER: execute V-REP_*_Setup_*.exe in those folders. Then remove folder program files (x86)/V-REP3. Prior to that you should backup an existing license key.
The Vortex plugin is now based in the free version of the Vortex engine: Vortex Studio. The user will however have to download/install Vortex Studio, and register with CM Labs, in order to enable the vortex plugin for V-REP.
The Vortex plugin now has the multithreading option turned off by default, since this provides better stability and faster simulation speeds for typical V-REP scenes.
Reworked the position dialog and the orientation dialog.
Added various API functions: sim.transformBuffer.
Added a reconfigurable model of the Ragnar robot: Models/robots/non-mobile/ragnar.brm
Added a new command line option allowing to disable specific GUI items.
Material properties (used by the physics engines) are not shared among shapes anymore, since this lead to confusions and apparently strange behaviours, and material pollution. Now, every shape has its own set of material properties. Material properties can be copied from another shape, or set to a predefined type
Custom UIs can now display plots, be modal, etc. A few bugs have also been fixed.
2D visualization of newly added graph objects is now based on the custom UI plot functionality.
Added following API functions to the ROS Interface: simROS.getTime, simROS.hasParam, simROS.searchParam, simROS.deleteParam, simROS.getParamBool, simROS.setParamBool, simROS.getParamInt, simROS.setParamInt, simROS.getParamDouble, simROS.setParamDouble, simROS.getParamString, simROS.setParamString.
Added an improved version of the playback tool: Models/tools/playback tool.ttm: it operates faster, requires less memory, and uses the custom UI plugin.
Added a tool for viewing custom data blocks attached to objects or a scene: Models/tools/custom data block reader.ttm.
Added an API function, based on the CGAL library, that allows to extract a shape from a point cloud: simSurfRec.reconstruct_scale_space. A model using that function is available here: Models/tools/surface reconstruction.ttm
Added a model allowing to import a point cloud from a *.xyz file format: Models/tools/point cloud importer.ttm
Added an option to record the desktop, including overlapping dialogs, instead of only the simulation window in the video recorder.
The Reflexxes Motion Library type 4 plugin (RML4 plugin) is no longer distributed. Instead, a RML2 plugin is distributed. This means that jerk limitation is no longer supported. The former RML4 plugin is however still functional (i.e. simExtRML4.dll/libsimExtRML4.so/libsimExtRML4.dylib): simply replace or place it alongside the RML2 plugin in the V-REP main folder.
The OpenGl-based custom UI edition capability was removed, since that functionality is not as flexible and elegant as the Qt-based custom UIs. OpenGl-based custom UIs will however still be functional, and you can enable edition capability again with variable enableOpenGlBasedCustomUiEditor in file system/usrset.txt.
Added a simulation model of the UR3 robot: Models/robots/non-mobile/UR3.ttm.
CoppeliaSim Edu / V-REP PRO EDU can now read scene and model files from XReality. CoppeliaSim Pro / V-REP PRO can now read/write scene and model files from/for XReality.
Added following two API functions: sim.setReferencedHandles and sim.getReferencedHandles.
Added a model of Marty the Robot (in Models/robots/mobile/ ), courtesy of Sandy Enoch of Robotical Ltd. and Alejandro Bordallo. Marty is designed to work with the official ROS Marty stack.
A swarm controller for the teleoperation of robot swarms in a V-REP based simulation environment, courtesy of the robotics and control systems laboratory of the Sapientia Hungarian University of Transylvania, is available here.
Added a JSON module for Lua: dkjson, courtesy of David Heiko Kolf.
V-REP V3.3.2 (August 29th 2016)
Fixed several bugs. Thanks to Hao Wang, Robert Lang, Riccardo Spica, Matias Nitsche, Sven Knüppel, Ndivhuwo Makondo, Yu Zhang, Paul Santiago Tumbaco Casa, DeKita G. Moon, Rodrigo Moreno Garcia, Federico Ferri and Arjun Narayanan for noticing them or helping to resolve them.
Improved the point cloud functionality. You can now specify a minimum distance tolerance which is used to avoid duplicate points. The tolerance can be specified in the point cloud properties dialog, or via sim.insertPointsIntoPointCloud or sim.insertObjectIntoPointCloud.
Added a simulation model of the Sawyer robot: models/robots/non-mobile/Sawyer.ttm. The original CAD data is courtesy of Rethink Robotics.
Added an infinite floor model, that allows to mimic an infinite floor: Models/infrastructure/floors/infiniteFloor.ttm.
Added the paths <currentScenePath> and <V-REPInstallationPath/lua> to the Lua path variable of all scripts.
Improved the custom UI plugin: widgets can now be enabled/disabled, and event messages supressed when setting a widget value. An editing finished event can now also be generated for edit boxes.
Added a G-code interpreter that can be found in lua/gcode.lua. A demo scene was also added: Scenes/gCode.ttt.
Added several new API functions: sim.openTextEditor, sim.packTable and sim.unpackTable.
Added a first version of a SDF format importer plugin, courtesy of Federico Ferri.
An SDL2 library plugin, courtesy of Tobias Benz, is available here.
V-REP V3.3.1 (May 17th 2016)
Fixed several bugs. Thanks to Ahmed Yacine, Korolyov Alexei, Graeme Neff Wilson, Daniel Angelov, Scott Hissam, Mohammed Talha and Mark Fink for noticing them or helping to resolve them.
Added a new ROS plugin (ROS Interface), which supports most standard ROS messages, and which naturally duplicated the ROS C/C++ API. We highly recommend to use this new ROS interface, rather than the previous one (RosPlugin). Both however can run side-by-side. The scene controlTypeExamples.ttt was adjusted and now includes an additional robot, which is controlled via the new ROS Interface. A new scene was created that also illustrates the new ROS Interface: rosInterfaceTopicPublisherAndSubscriber.ttt.
Added a new object type: OC trees. They represent a spatial partitioning based of voxels and can be used for various purposes (e.g. simplified shape representation, occupancy grid/space, etc.). OC trees are collidable, measurable and detectable. New API function related to OC trees are listed here.
Added a new object type: point clouds. They represent points stored inside of an OC tree-like data structure and can be used for various purposes (e.g. point storage and manipulation, etc.). Point clouds are collidable, measurable and detectable. New API function related to point clouds are listed here.
Added a new scene (collisionDetectionDemo.ttt), which illustrates V-REP's collision detection capabilities on dummies, shapes, OC trees and point clouds.
Added a new scene (minimumDistanceCalculationDemo.ttt), which illustrates V-REP's minimum distance calculation capabilities on dummies, shapes, OC trees and point clouds.
Added a new scene (proximitySensorDemo2.ttt), which illustrates V-REP's proximity sensor capabilities on dummies, shapes, OC trees and point clouds.
Added two new scenes: octreeGenerationDemo.ttt and navigationWithinAPointCloud.ttt.
Added a new OMPL plugin function, that allows to specify several goal states for a given task: simOMPL.addGoalState. Following demo scenes now use this new functionality: motionPlanningDemo1.ttt, motionPlanningServerDemo.ttt and motionPlanningAndGraspingDemo.ttt.
Added a new type of custom user interface, based on a plugin and Qt: Qt-based custom UIs. A demo scene can be found at scenes/customUI-QtBased.ttt.
Added a menu item that allows to compute the inflated convex hull of a shape. This is useful in order to generate simplified collision object that are slightly bigger than their original. The menu item is located at [Add > Inflated convex hull...]
Added stack functions that allow to hold almost any type of data or data structure. This is useful for flexible communication between plugins and scripts. Following new API functions now use stacks: simCallScriptFunctionEx and simRegisterScriptCallbackFunction.
Added setter and getter API function for the physics engine properties.
Added a newer version of the Bullet engine (i.e. V2.83). The new version offers now 4 different solver types: sequential impulse, NNCG, Dantzig, and projected Gauss-Seidel. All physics engine's plugins have been reworked.
Added two additional spherical vision sensors: they now allow to retrieve spherical RGB images, spherical depth buffers, or spherical RGB images and depth buffers: Models/components/sensors/spherical vision sensor RGB.ttm, Models/components/sensors/spherical vision sensor depth.ttm, Models/components/sensors/spherical vision sensor RGB + depth.ttm.
Reworked the Velodyne sensors, which are now using the new point cloud object. This means that sensor points can now be collidable, measurable and detectable.
Added three new API functions: sim.loadImage, sim.getScaledImage and sim.transformImage.
Added a model, allowing to start, pause, stop or step a synchronous simulation, from a ROS node. The model is based on the new ROS Interface and is located in Models/tools/rosInterfaceHelperTool.ttm
An IMU ROS plugin, courtesy of Bartolomeo Della Corte, is available here.
V-REP V3.3.0 (February 19th 2016)
Fixed several bugs. Thanks to Federico Ferri, Tiago Malheiro, Raimund Krenmueller, Ahmed Yacine, Matthias Ploner, Indranil Sur, Sung Kyun Kim, Andrew Hundt, Rik Timmers, Matthew Veres and Graeme Neff Wilson for noticing them or helping to resolve them.
Added a first version of a plugin that wraps OMPL, the Open Motion Planning Library. The plugin is courtesy of Federico Ferri. The source code of the plugin is located here. Following demo scenes are now using the OMPL plugin functionality: motionPlanningDemo1.ttt, motionPlanningAndGraspingDemo.ttt, 3DoFHolonomicPathPlanning.ttt and 6DoFHolonomicPathPlanning.ttt, motionPlanningServerDemo.ttt.
Added a new ROS service, ROS publisher type, and ROS subscriber type: simRosCallScriptFunction, simros_strmcmd_receive_data_from_script_function and simros_strmcmd_send_data_to_script_function. These are very useful when a regular API function is not immediately available in the RosPlugin, or when a succession of complex commands need to be executed locally. Have a look at the demo scene rosTopicPublisherAndSubscriber2.ttt, which illustrates the new functionality.
Improved and corrected the sim.callScriptFunction API function.
Added an API function that allows to compute the Jacobian of an IK group.
The V-REP source code can now be compiled for headless operation, without any Qt dependency. In that case however, the vision sensors will only generate an image content when the rendering is handled via a plugin (e.g. POV-Ray or and external renderer).
Added following new API functions: sim.computeMassAndInertia and sim.getExtensionString.
Added a model of the uArm with gripper and inverse kinematic routine: Models/robots/non-mobile/uarm with gripper.ttm
A constrained optimization IK plugin for V-REP, courtesy of Andrew Hundt, is available here. Installation instructions for Linux / OSX are available here.
V-REP V3.2.3 (November 24th 2015)
Fixed several bugs. Thanks to Karol Mocniak, Ana Lucia, Ricardo Azambuja, Diego Daniel Santiago, Graeme Neff Wilson, Anto Ronson and Minson Lee for noticing them or helping to resolve them.
Added a simulation model of the ABB IRB 4600-40/2.55 robot, courtesy of ABB. The model is located at Models/robots/non-mobile/ABB IRB 4600-40-255.ttm
Added a scene illustrating workspace visualization: scenes/workspace.ttt
Added several new API functions: sim.getQHull, sim.getDecimatedMesh.
Added two simple add-ons illustrating scene content export/import: minimalisticExporter and minimalisticImporter.
Improved the convex hull calculation routines.
Added several convenience functions to morph shapes into their convex hull repesentation, to decimate shapes, and to extract a shape's inside. The functions can be accessed with [Edit > ...].
Added a new tutorial on building clean and efficient simulation models. This tutorial is a must for everyone who wishes to create his/her own models.
Simplified the BubbleRob tutorial.
Added a section about joint controllers and how to implement them within V-REP, or inside of an external application (e.g. a remote API client, or a ROS node).
Added a model of the P-Arm robot, and two of its grippers. The CAD data is courtesy of F&P Robotics. The models can be found at models/robots/non-mobile/P-Arm.ttm, models/components/grippers/P-Grip-straight.ttm and models/components/grippers/P-Grip-right-angle.ttm.
Added several simple example scenes that illustrate how to use the kinematics module. The scenes can be found in scenes/kinematics.
Updated the webcam plugin for V-REP, using the newest ESCAPI library. A model using that plugin can be found in Models/other/webcam.ttm. The source code of the plugin can be found here.
Added a simulation model of the Velodyne VPL-16. The model can be found in Models/components/sensors/velodyne VPL-16.ttm.
Added a new API function that allows to call a script function from a plugin or another embedded script: sim.callScriptFunction.
V-REP V3.2.2 (September 5th 2015)
Fixed several bugs. Thanks to Kshitij Tiwari, Victor Gomez, Martin Pecka, Parker Owan, Raimund krenmüller, Robert Lang, Muhammad Umer Huzaifa, Marshall Floyd, Inkyu Sa, Augusto Gandia, Raimund Krenmüller, Tobias Groll, Wu Xiaojun for noticing them or helping to resolve them.
Switched to Qt 5.5.0 for the Windows, the MacOS and the Linux versions.
Reworked many dialogs by adapting the floating-point number display, the unit display, and removing some deprecated/rarely used items. The user interface units are now fixed to degrees, meters, seconds, kilograms, Newtons, etc. to avoid confusions.
Added an edit mode for compound shapes. This allows to edit the visual parameters of a compound shape without having to ungroup it.
Added a possibility to automatically compute the mass and inertia matrix for convex shapes in the shape dynamic properties. The algorithm is courtesy of Chris Hecker.
Added a plugin able to render ray-traced images (via vision sensors or via cameras). This will allow to perform more realistic image-based control. The plugin is based on POV-Ray and allows rendering shadows (also soft) and focal blur. The ray-tracer plugin is courtesy of Andreu Vidal. The source can be found here.
Added a plugin for support of the Newton Dynamics engine. The plugin is currently a BETA version, and will be improved for next release. The plugin is courtesy of Julio Jerez and Alain Suero.
Added a scene that demonstrates the various rendering modes available in V-REP: scenes/rendererDemo.ttt.
Modified the way how V-REP interacts with the physics plugin: it is now possible to compile the Bullet, ODE, Vortex or Newton plugins separately. This will greatly simplify adding additional physics engines.
Modified the legacy remote API Python bindings, including the Python example programs. They should work fine on Python 2.x, Python 3.x and IronPython.
The OpenRTM-aist is now supported thanks to Yuki Suga. Installation instructions are given here.
Moved the Qhull functionality out of V-REP's main library, into a plugin (simQHull). The source code can be found here.
Moved the convex decomposition functionality out of V-REP's main library, into a plugin (simConvexDecompose). The source code can be found here.
The convex decomposition plugin now also offers the V-HACD algorithm (next to the HACD algorithm). Both are courtesy of Khaled Mamou.
Added a model of a ball balancing robot: Models/robots/mobile/ball robot.ttm.
Added a model of the uarm: Models/robots/non-mobile/uarm.ttm. The CAD data is courtesy of EVOL.
Added a model of the RG2 gripper: Models/components/grippers/RG2.ttm. The CAD data is courtesy of On Robot ApS.
Added a demo scene illustrating a grasping task with the UR5 robot and RG2 gripper: Scenes/ur5WithRg2Grasping.ttt.
Added a model of a tracked vehicle, courtesy of Qi Wang: Models/vehicles/tracked vehicle.ttm.
Updated the screenshot tool in order to be also able to render ray-traced screenshots (Models/tools/high-res screenshot tool.ttm).
The NAO robot can now be controlled via Python and python NAOqi SDK. The project is available here, and is courtesy of Pierre Jacquot and Gurvan Le Bleis.
A Xbox 360 controller plugin is available for V-REP here. The plugin is courtesy of Nicola Di Pol.
Added a shared memory communication plugin for V-REP, courtesy of Diego Daniel Santiago. The files, including a Simulink example, are located in programming/sharedMemoryCommunicationPlugin.
V-REP V3.2.1 (May 4th 2015)
Fixed several bugs. Thanks to Jan Dentler, Robert Lang, Raimund Krenmüller, Cedric Pradalier, Reza Mahjourian, Anuraj Rajendraprakash, Sébastien Granges, Ángel Luis Jiménez García, Leander Hille, Pierre Rouanet, Ulrich Schwesinger, Kenichi Hara, Federico Ferri, Martin Pecka and Nicola Piccinelli for noticing them or helping to resolve them.
Added 2 classes (CLuaFunctionData and CLuaFunctionDataItem) that greatly simplify passing arguments to/from custom Lua function created in plugins. The two classes are located in the programming/include folder.
Completely rewrote the Khepera3, the MTB, and the BubbleRob plugins: they have been greatly simplified.
V-REP now supports the RRS-1 specifications via a plugin (simRRS1). It allows to connect and interact with all RCS modules and robots that supports the RRS-1 specifications. For an example have a look at the demo file scenes/RRS-1 demo.ttt.
Rewrote the plugin tutorial, which has become much simpler.
Rewrote the robot language integration tutorial, which has become much simpler.
The CHAI3D plugin (for interfacing a haptic device) has been completely rewritten and greatly improved, courtesy of Sébastien Granges. Visit www.chai3d.org or www.forcedimension.com for the source code of that plugin. In case it is not yet available on those websites, please contact us.
Added a demon scene that illustrates navigation of a mobile robot via a haptic device (Scenes/hapticRobot.ttm). The device will let the user feel the obstacles.
Added an interface plugin to the OpenMesh library. The plugin source code is located here.
Added a tool model that allows to simplify high-poly shapes: Models/tools/mesh decimation tool.ttm. The tool relies on the new OpenMesh plugin for V-REP.
Added a tool model that allows to separate the inside/outside parts of shapes: Models/tools/mesh inside outside separation tool.ttm.
Added a demo scene (Scenes/headlessModeDebug.ttt) that illustrates how to launch a headless instance of V-REP, connect to it, and stream back the view of the scene.
Added a model that allows to extract Denavit-Hartenberg parameters in a kinematic chain (Models/tools/Denavit Hartenberg parameter extractor.ttm).
Added a model that allows to create joints in poses defined by Denavit-Hartenberg parameters (Models/tools/Denavit Hartenberg joint creator.ttm).
Added an API function that allows saving images: sim.saveImage
Added a model, courtesy of Ulrich Schwesinger, allowing to take high-resolution screenshots of the scene: Models/tools/high-res screenshot tool.
Added a model that allows to modify shape colors that are named: Models/tools/color change tool from color names.ttm.
Added a model that allows to find the intersection between a plane and a ray: Models/tools/plane ray intersection finder tool.ttm.
An example of Snap! controlled line follower in V-REP is available here, courtesy of Ilya Nemihin.
A small Python programm that allows transferring a MeshLab inertia matrix to V-REP is available here, courtesy of Michael Michalik.
V-REP V3.2.0 (February 3rd 2015)
Fixed several bugs. Thanks to Reza Mahjourian, Ben Allan, Soner Ulun, Robert Lang, Guenter Schreiber, Sven Knüppel, Eva Alves Costa, Lucian Cucu, Sigurd Villumsen, Andrea Censi, Pierre Rouanet, Leander Hille, Christoph Hügle, William Harrison, Robert Lang and Scott Drew Pendleton for noticing them or helping to resolve them.
Switched to Ubuntu 14.04.1 LTS for Linux versions of V-REP.
The precompiled ROS items are now specifically meant for ROS Indigo. If you use a different version, make sure to recompile them.
Switched to Qt 5.4.0 for Linux versions of V-REP.
Improved the visual appearance of 3D objects by adjusting the way meshes are rendered. This can lead to small differences in color/lighting with previous V-REP releases. You may have to adjust the ambient light manually.
Added backtrace information output, for easier debugging of script code.
Script colors can now individually be adjusted. See the file system/usrset.txt.
Objects can now be selectively seen from a given camera or vision sensor. This can be adjusted in the object common properties.
High resolution displays (such as Retina display) are now fully supported, and should be automatically detected. You can force a different behaviour by adjusting the value of highResDisplay in the file system/usrset.txt.
Added a model of the Velodyne HDL-64E S2 Lidar: Models/components/sensors/velodyne HDL-64E S2.ttm.
Added a model that allows interaction with a haptic device (Models/other/interface to haptic device.ttm), courtesy of Force dimension, Francois Conti (CHAI3D) and Julien Tharin. The related plugin project files are located here.
Added a model of a customizable office building: Models/infrastructure/urban/customizable building.ttm.
Added a model of a paint bomb: Models/components/modifiers/paint bomb.ttm.
Added a model that allows to quickly adjust the color of shapes or entire models: Models/tools/quick shape color tool.ttm.
Added a model that allows to quickly adjust all the lights in a scene: Models/tools/quick light adjust tool.ttm.
A V-REP ROS bridge is available here, courtesy of Riccardo Spica and Giovanni Claudio.
Pioneer 3D-X controlled via a visual servoing law (courtesy of Riccardo Spica and Giovanni Claudio)
A first backend to integrate ros_control loop in V-REP is available here, courtesy of Antoine Rennuit.
Added following new API functions: sim.switchThread (now also available from the C API), sim.packUInt8Table, sim.unpackUInt8Table, sim.packUInt16Table and sim.unpackUInt16Table.
Added a model that allows to measure the distance between two clicked points in the scene: models/tools/point-point distance tool.ttm.
Added a model that allows to measure the normal vector of a clicked surface in the scene: models/tools/normal vector measurement tool.ttm.
V-REP V3.1.3 (October 1st 2014)
Fixed several bugs. Thanks to Renaud Detry, Daniel Lechner, Ulrich Schwesinger, Sven Knüppel, Steve Nguyen, Jonas Sperling, James Besancon, Andrew Vardy, Rodrigo Moreno Garcia, Thomas Estier, Matthias Imle, Daniel Kuhner, José Rosado, Eric Rohmer and Soner Ulun for noticing them or helping to resolve them.
Improved the embedded script editor with following new features: highlighting of all occurrences of selected word, source folding/unfolding, simple word search via the <ctrl+f> key.
External script editors can now be customized with the data in file v-rep_notepad++.zip: this allows for keyword highlighting, auto-completion and call tip display.
Improved the shape serialization routines, effectively reducing generated file sizes, mainly if they contain duplicate geometric content. The generated file format cannot be read by previous V-REP versions (prior to V-REP 3.1.3), so make sure to make backup copies.
Added a new type of embedded script: customization scripts. They are associated with scene objects (same as child scripts) and can be used to customize a simulation scene to a great extent. The main difference with child scripts is that customization scripts are running all the time, also when simulation is not running.
Added several models that demonstrate the new customization script functionality: Models/nature/terrain bump.ttm, Models/nature/Terrain.ttm, Models/nature/Tree.ttm, Models/infrastructure/other/resizable concret block.ttm, Models/infrastructure/floors/resizable floor*.ttm, Models/tools/playback tool.ttm, Models/tools/isometric scaling tool.ttm, Models/tools/name change tool.ttm, Models/tools/custom data viewer tool.ttm, Models/equipment/conveyor belts/customizable conveyor belt.ttm, Models/furniture/tables/customizable table.ttm.
Modified the way child scripts are handled in order to make them operate in a more coherent manner:
child scripts execution is now automatically cascaded (i.e. no need to explicitly call simHandleChildScript anymore).
child scripts are now executed in the actuation phase as well as in the sensing phase of a given simulation step: there is no distinction anymore with what previously used to be sensing child scripts.
script compatibility with previous file versions is guaranteed by 1) automatic child script code modification (clearly marked as such), 2) automatic main script replacement. This covers 99% of all situations, but it can happen that this automatic modification partly fails (e.g. when the main script was customized, or when explicitly executing a specific child script (previously marked as explicit handling)). In that case, contact us for assistance.
Improved the rendering speed. If compatibility issues arise, please contact us, and try to disable VBO operation here.
Improved the start-up time of certain simulation scenes, by adding a broad mode for collision detection, minimum distance calculation and proximity sensor detection: Oriented Bounding Box (i.e. OBB) data structures are now only computed on-the-fly and only when absolutely necessary.
Added 3 new API functions: sim.copyPasteObjects, sim.scaleObjects and sim.removeModel. simCopyPasteSelectedObjects, simScaleSelectedObjects and simDeleteSelectedObjects are declared deprecated.
Added project files for custom ROS plugins for V-REP (i.e. in order to support specific ROS messages of a specific robot).
Added a model of the Robotnik Summit XL robot, courtesy of Roberto Guzman: Models/robots/mobile/Robotnik_Summit_XL_140701.ttm
Improved the undo/redo functionality that now operates in a more consistent manner. Camera movements are not considered as undo points anymore. This behaviour can be adjusted via the user settings file system/usrset.txt.
The API functions sim.readCustomDataBlock and sim.writeCustomDataBlock can now also be used to attach custom data to scripts. At the same time you can now also specify whether the data should be saved during a scene or model save operation.
The vision sensor code has been optimized and vision sensors now run faster. They now can also operate in a different mode, in order to simulate the temperature of objects for instance, or in order to detect object handles.
Added several new API functions: sim.getObjectsInTree, sim.scaleObject (i.e. non-isometric scaling), sim.getShapeTextureId, sim.setShapeTexture, sim.getCollectionObjects, sim.handleChildScripts
Added a SLAM demo based on ROS, courtesy of Leopoldo Armesto.
Added a link to a tutorial on teaching robotics with a simulator, courtesy of Prof. Renaud Detry.
Added a link to a Python quadrotor simulator, courtesy of B. Acharya, F. Gisa, and S. D. Levy.
Added a link to the TAPIR implementation of the Adaptive Belief Tree (ABT) algorithm, courtesy of Hanna Kurniawati, Dimitri Klimenko, Joshua Mun Song and Vinay Yadav.
The middle mouse button can now be deactivated in order to not react to a press action. This can be done in the user settings file in system/usrset.txt.
Added an interface model to the Arduino Esplora, located in Models/other/Arduina Esplora.ttm. The model is courtesy of Eric Rohmer.
Added a demo scene that illustrates how to simulate gear mechanisms with Vortex: scenes/gearMechanism.ttt.
Changed the camera navigation method: camera rotations are now performed with the middle mouse button, instead of the right mouse button (which was, to many, confusing and not practical). The right mouse button is now exclusively reserved for pop-up menus. The previous navigation method can still be enabled via the variables navigationBackwardCompatibility and middleMouseButtonSwitchesModes in the system/usrset.txt file, but this is not recommended since this option will probably disappear in future.
Added a play back tool, that allows you to manually step through a simulation. The model file is located in Models/tools/playback tool.ttm.
V-REP V3.1.2 (June 17th 2014)
Fixed several bugs. Thanks to Matt Derry, Daniel Morberg, Andreas Kuhner, Danilo Vasconcellos Vargas, Spencer Krause, Daniel Kuhner, Luigi Ferri, Filip Jares, Michaela Richter, Matthias Schindler and Ulrich Schwesinger for noticing them or helping to resolve them.
The joint dynamics properties have been reorganized in order to facilitate the creation of spring-damper systems, by allowing to directly specify the spring constant K and its damping coefficient C.
Matlab versions previous to 2008a might be supported via the files located here, courtesy of Gerold Huber.
The RosPlugin was catkinized, courtesy of Arne Hitzmann and Sergi Foix.
V-REP now also supports 3D OpenGL stereo mode (for dedicated hardware, i.e. specific stereo-enabled graphic cards with corresponding monitor/device). To enable it, set a value different from 0 for stereoDist in file system/usrset.txt. The console should indicate at start-up if the mode was successfully enabled. Make sure to correctly configure your graphic card (i.e. 3D OpenGL stereo & correct stereo display mode).
Added a simulation model of the Baxter robot, including its vacuum cup and gripper tools: models/robots/non-mobile/Baxter.ttm, models/components/grippers/Baxter vacuum cup.ttm and models/components/grippers/Baxter gripper.ttm. The original CAD data is courtesy of Rethink Robotics.
Added a simulation model of the Phantom X Pincher: models/robots/non-mobilePhantomXPincher.ttm. The original CAD data is courtesy of Trossen Robotics.
Added models of a generic revolute motor, a generic revolute servo (with and without backslash), a generic revolute spring-damper, and a generic prismatic motor. They are located in the models/components/actuators/ folder.
Improved the OBJ file format importer.
Switched to an updated Vortex library (V6.1.2) that offers an improved contact generation.
Added a simulation model that allows visualizing the center of mass of a dynamic model: models/other/center of mass visualizer.ttm.
Added a new API function to retrieve geometric information about shapes: sim.getShapeGeomInfo.
Added a new API function that helps to make a motion planning transition from one configuration to another, by following a predefined Cartesian space path. This is useful for redundant manipulators, but also for safely driving non-redundant manipulators via IK through a singular configuration: simGetMpConfigTransition.
simRMLPosition and simRMLVelocity are declared deprecated and are replaced by following API functions: sim.ruckigPos, sim.ruckigVel, sim.ruckigStep and sim.ruckigRemove.
Added a simulation model of the Adept Quattro 650HS parallel manipulator, courtesy of Preben Hjornet: models/robots/non-mobile/Adept Quattro 650HS.ttm. The original CAD data is courtesy of Adept Technology.
Added a plugin that implements shared memory communication, courtesy of Diego Daniel Santiago. The source code, currently only running on Windows, is located here.
V-REP V3.1.1 (March 27th 2014)
Fixed several bugs. Thanks to Stéphane Magnenat, Ulrich Schwesinger, Philipp Krüsi, Pascal Gohl, Klaus Raizer, Paulo Gurgel, Marco Bellaccini, Gianpaolo Gonnelli, Felix Herrmann, Edgar Virga, Josep Tormo Costa, Gaël Ecorchard, Renaud Detry, Marc Durvaux, Robert Lang and Alexander Rietzler for noticing them or helping to resolve them.
Added simulation models of the new KUKA LBR IIWA robots: models/robots/non-mobile/KUKA LBR4 iiwa 7 R800.ttm and models/robots/non-mobile/KUKA LBR4 iiwa 14 R820.ttm
Added a simulation model of the Pioneer P3DX robot, courtesy of Eric Rohmer and Joost a.k.a. J-m@n: models/robots/mobile/pioneer p3dx.ttm
Added a simulation model of the Jaco manipulator, courtesy of Eric Rohmer and Kinova Robotics for the CAD data: models/robots/non-mobile/Jaco arm.ttm and models/components/grippers/Jaco hand.ttm.
Added a simulation model of the Mico manipulator, courtesy of Eric Rohmer and Kinova Robotics for the CAD data: models/robots/non-mobile/Mico arm.ttm and models/components/grippers/Mico hand.ttm.
Added preliminary simulation models of the UR5 and UR10 robots, courtesy of Universal Robots for the CAD data: models/robots/non-mobile/UR5.ttm and models/robots/non-mobile/UR10.ttm.
The simulation model of the Kuka LBR4+ was updated by Massimo Cefalo, in order to beahve more like the real one (adjusted masses and inertia matrices).
Added new API functions to create and modify textures: sim.getTextureId, sim.readTexture, sim.writeTexture, sim.createTexture.
Added new API functions related to motion planning: simSimplifyMpPath and simFindIkPath.
Completed the documentation of the motion planning functionality.
Added new API functions that allow to easily store custom data inside of scene objects, or inside of a scene file: sim.writeCustomDataBlock and sim.readCustomDataBlock.
Added a new simulation scene that illustrates motion planning and grasping: scenes/motionPlanningAndGraspingDemo.ttt.
Added a new plugin (simVision) in charge of various tasks. Currently, it exports 2 custom Lua function to handle spherical vision sensors and anaglyph stereo cameras. The plugin source code is located here.
Added a simulation model of a spherical camera, which features a 360x180 view of the scene: models/components/sensors/spherical vision sensor.ttm.
Added a simulation model of an anaglyph stereo camera, which generates anaglyphic images (e.g. red-cyan coded images): models/components/sensors/anaglyph stereo vision.ttm.
V-REP V3.1.0 (January 20th 2014)
Switched to Qt5.2.0 for the Mac and Linux releases, which solved a few open glitches/bugs. The Windows release is still running under Qt5.1.1.
Fixed several bugs. Thanks to Matthias Schindler, Renaud Detry and Ulrich Schwesinger for noticing them.
Added a scene that illustrates the new ghost recorder functionality: ghostDemo.ttt.
Added two models that illustrate the new ghost recorder functionality: Models/other/ghostRecorder.ttm and Models/other/ghostTracer.ttm
Added a file-menu item that allows easily loading recently opened scene files.
simLockInterface is declared deprecated and has no effect anymore.
Added a model of a basket: Models/infrastructure/other/largeBasket.ttm.
Added a Debug menu item in the Help menu. This allows displaying various debug information to the console or a file, or running the simulator in special modes.
Added a laserscan and odometry publisher to the RosPlugin, together with a laser scanner model prepared for ROS: models/components/sensors/Hokuyo_URG_04LX_UG01_ROS.ttm. The code modification and the model are both courtesy of George Moustris.
Added following regular API functions: sim.quitSimulator.
Added the option to run V-REP headless (without any graphical user interface (i.e. in the command line only)), as well as other command line options. The graphics libraries are still needed. A binary that doesn't rely of graphics libraries is planned.
Added a bridge to OpenCV via a plugin, courtesy of Marco Bellaccini. The files are located here.
Added a first version of a Labview interface for the legacy remote API, courtesy of Peter Mačička.
V-REP V3.0.5 (October 27th 2013)
Switched to Qt5.1.1. Many changes and refactorings were made, and are still ongoing.
Added optional support for high fidelity physics with the Vortex Studio engine. Thanks to Martin Courchesne and SimWat for their plugin implementation. The plugin will gradually be improved in order to support simulation requirements in various fields (fluids, particles, etc.).
Added a motion planning functionality, that allows to plan movement sequences of kinematic chains, in a clutered environment. The documentation on this is unfortunately not yet very exhaustive, make sure to refer to the motion planning dialog and the related API functions.
Added 3 scenes to illustrate the new motion planning functionality: motionPlanningDemo1.ttt, motionPlanningDemo2.ttt and motionPlanningDemo3.ttt.
Added a simulation model of the SICK TiM310 laser scanner: models/components/sensors/SICK TiM310 Fast.ttm
Fixed several minor bugs. Thanks to Billy Newman, Ruediger Dehmel, Renaud Detry, Roband and Hendrik Wiese for noticing them, and even providing patches.
Added a simulation model of a generic GPS sensor: models/components/sensors/GPS.ttm
Following texture file formats are now supported: JPEG, PNG, TGA, BMP, TIFF & GIF. Thanks to Sean Barrett for his image loading routines (used for GIF and TGA).
Adjusted all default light intensities and default object colors (ambient component only) in order to be more compatible with other CAD applications. Older scenes and models will automatically adjust for that during a load operation (i.e. light intensities will be scaled by 0.675, colors by 1.5). If you do not wish for this automatic adjustment, turn variable correctColorsAndLights to false in system/usrset.txt.
Added a ROS publisher for vision sensor depth data as RGBD point cloud, courtesy of Cedric Pradalier.
Fixed a bug affecting the regular API function sim.getObjectVelocity.
Added more predefined page configurations.
Added a gamepad interface to the RosPlugin. The code is courtesy of Roberto Marino.
Added a model of a buggy with suspension and differential: models/vehicles/manta with differential.ttm. The model is courtesy of Qi Wang.
Added a full screen mode.
V-REP V3.0.4 (July 8th 2013)
Fixed several minor bugs. Thanks to Brian Yeomans, Kiyoshi Irie, Ulrich Schwesinger, David Butterworth and Xinyu Zhang.
Added the possibility for vision sensors to ignore their RGB or depth information. When used, this allows to accelerate vision sensor operation. Refer to the vision sensor properties.
Added two new vision sensor filters. The first allows to extract coordinates from a vision sensor depth map. This allows to create fast laser scanner models, such as models/components/sensors/Hokuyo URG 04LX UG01_Fast.ttm or models/components/sensors/3D laser scanner Fast.ttm. The second added vision sensor filter allows to track individual pixel changes, such as in the model models/components/sensors/DVS128.ttm, courtesy of IniLabs.
Added a new demo scene: fabricationBlocks.ttt
Added several fabrication/transformation block models, that can be combined with each other to simulate complex fabrication processes (see the demo scene fabricationBlocks.ttt). The new models are located in models/examples/block factory.
Added a new model: models/components/sensors/push button.ttm
Added a new gripper model courtesy of ROBOTIQ: models/components/grippers/ROBOTIQ 85.ttm
Added a simulation model of the SICK S300 laser scanner: models/components/sensors/SICK S300 Fast.ttm
Added a simulation model of the KUKA Omnirob robot: models/robots/mobile/KUKA Omnirob.ttm
Added a simulation model of the KUKA LBR4+ robot: models/robots/non-mobile/KUKA LBR4+.ttm
Added a simulation model of the Kilobot, together with its controller model: models/robots/mobile/Kilobot.ttm and models/robots/mobile/Kilobot_Controller.ttm. The models are courtesy of K-Team.
Added new wall models, in 3 different heights: 240cm, 80cm and 20cm. They are located in models/infrastructure/walls
Removed the annoying watermark appearing when recording a movie (Simulated with V-REP)
V-REP V3.0.3 (April 29th 2013)
Fixed a bug created in release 3.0.2: primitive shapes would see their Bullet custom collision margin scalings set to a non-default value automatically. Thanks to Geerten Doornenbal and others for reporting this.
Fixed several minor bugs. Thanks to Qi Wang, Giordano and Karl Robillard.
Added also following new regular API functions: sim.getJointMode, sim.getJointTargetPosition and sim.getJointTargetVelocity.
Added 3 new object parameter IDs (3020-3022) that allow setting the initial rotational velocity of a dynamically enabled shape.
Added a toolbar button that facilitates object/model re-instanciation: this allows modifying in a same way an unlimited number of same robots.
Added a tutorial about a line following robot, courtesy of Eric Rohmer.
Added two new API functions: simEnableWorkThreads and simWaitForWorkThreads. They allow to execute sensing operations concurrently (i.e. in parallel), taking advantage of several processor cores. By default the functionality is turned off. It can be turned on via the user settings dialog, the variable workThreadCount in file system/usrset.txt, or programmatically via sim.setInt32Param(sim.intparam_work_thread_count,coreCount). Refer also to the default main script, that was slightly modified to accomodate for that.
Added a new model: models/other/timing info.ttm. It allows to quickly have an overview of the time spent in the various calculations.
Added a new model: models/other/joint recorder.ttm. It allows to record the joint movements of a model, then to play them back.
Added a new model: models/robots/mobile/NAO.ttm. The model is courtesy of Marco Cognetti, the mesh and movement data is courtesy of Aldebaran. The model is a first example model of NAO, an improved version should follow in next release.
Added following new RosPlugin services/publishers: simRosGetAndClearStringSignal and simRosCreateDummy.
V-REP V3.0.2 (March 14th 2013)
Corrected a bug related to convex shapes
Improved the URDF importer (scaling is now taken into account and rpy mix-up (different rotation multiplication order) was also fixed). Thanks to Barrett Ames and Luca Marchionni for pointing that out.
Added a new regular API function: sim.getObjectVelocity (slightly different from the already existing sim.getVelocity function).
Added a new RosPlugin service: simrosAppendStringSignal. This allows to easily send data that is automatically buffered on V-REP.
Added some testing / adjustment mechanisms to improve rendering performance on certain graphic cards / platform combinations. Thanks to Cedric Pradalier for intensive testing. Refer to the system/usrset.txt file.
Corrected various bugs. Thanks to Arnaud Leleve, Geerten Doornenbal, Pouya Mohammadi, Nikolaus Wittenstein, Ayberk Ozgur.
Replaced the old convex hull calculation routines with the Qhull routines, courtesy of Brad Barber.
Added a few new shortcut keys.
Added an example Ackermann steering vehicle: models/examples/simple Ackermann steering.ttm
Added two transceiver models: models/components/sensors/transceiver.ttm and models/components/sensors/directionalTransceiver.ttm
Added several mechanisms allowing to execute sensing operations concurrently (i.e. in parallel), taking advantage of several processor cores. By default the functionality is turned off, since still in development phase. It can be turned on via the variable workThreadCount in file system/usrset.txt, or programmatically via sim.setInt32Param(sim.intparam_work_thread_count,coreCount). Refer also to the default main script, that was slightly modified to accomodate for that.
V-REP V3.0.1 (January 20th 2013)
Convex shapes are now also directly supported in V-REP. We however still recommend using only primitive shapes for dynamic simulations.
Added a convex decomposition function (routines courtesy of Khaled Mamou)
Added one new regular API function: sim.convexDecompose.
The URDF importer is now in an advanced beta stage.
V-REP V3.0.0 (January 10th 2013)
V-REP is now open source! All source code of V-REP or any related item can be downloaded, modified and compiled. Make sure to read the licensing conditions.
V-REP comes now is several flavours:
V-REP PRO EDU (educational version. No limitation and Free). Can be used by hobbyists, students, teachers, professors, schools and Universities. Make sure to read the licensing conditions.
V-REP PRO (commercial version)
V-REP PLAYER (free player version)
Collada importer/exporter plugin
URDF importer plugin, courtesy of Ignacio Tartavull
Added 4 new regular API functions: sim.createForceSensor, sim.createProximitySensor, sim.createVisionSensor and sim.importShape.
Added a quick textures button to the shape properties: it allows for instance to quickly apply a "dirt" texture to several shapes, in order to make them appear more realistic.
New demo scene: proximitySensorDemo.ttt
V-REP V2.6.8 (December 2nd 2012)
Add-ons are now supported: they can run in the background, or be called as a function, when needed
Added sim.createDummy.
Textured shapes can now also be grouped
The bounding box of primitive compound shapes can now also be reoriented
The shape dynamics properties dialog allows now specifying non-diagonal inertia matrices relative to a specific reference frame.
Shape grouping will now correctly compute the combined inertia matrix for the group.
Added 2 new regular API functions: sim.groupShapes and sim.ungroupShape.
Added more than 80 new functions, only available from the C/C++ interface, that extend functionality and allow faster data access.
Serialization version is now 16. Earlier files can still be loaded, but V-REP versions 2.6.7 and earlier cannot load this new fileformat.
V-REP V2.6.7 (September 20th 2012)
Added a new ROS service, and ROS subscriber type: simRosSetJointState and simros_strmcmd_set_joint_state. They allow to set several joints' states at the same time.
Added following ROS publisher/subscriber types (courtesy of Cedric Pradalier): simros_strmcmd_get_range_finder_data, simros_strmcmd_get_transform, simros_strmcmd_get_twist_status, simros_strmcmd_get_vision_sensor_info, and simros_strmcmd_set_twist_command.
Converted the simMTB plugin to a Qt project. Source files are located here. Refer to the section on plugins for details how to compile this plugin. The plugin binary is in the main directory.
Converted the mtbServer application to a cross-platform project. Source files are located here. The executable binary is in the main directory.
Added a project that demonstrates the Coppelia kinematics routines functionality.
An external editor for V-REP's embedded scripts can now be used. Refer to the user settings.
Additional texture mapping methods have been implemented: cylinder-, sphere-, or box-mapping. Refer to the texture dialog for details.
The linux version of V-REP comes now in 32 or 64 bit.
Added 2 new functions to handle object/joint motion from a threaded script: sim.rmlMoveToPosition and sim.rmlMoveToJointPositions
V-REP V2.6.6 (August 20th 2012)
The RosPlugin is now fully operational and offers 100 services, 30 publisher types and 25 subscriber types. The plugin is fully open source and can easily be adapted to various projects if needed. Have a look at the ROS tutorial for a quick start.
Integrated the Reflexxes Motion Library type IV via a plugin. Have a look at the related demo scene: "reflexxesMotionLibraryType4Demo.ttt"
Added 4 new API functions: sim.getObjectQuaternion and sim.setObjectQuaternion
Added an option to colorize items in the scene hierarchy, for quicker identification
New scene: "reflexxesMotionLibraryType4Demo.ttt"
New model: "kinect - closest point calculation.ttm"
Added a new tutorial: ROS tutorial.
V-REP V2.6.5 (July 7th 2012)
Fixed a few bugs related to the Linux/Mac version of the legacy remote API
Added a new toolbar button to handle object assembling/disassembling. The way two objects assemble via this toolbar button can be adjusted in the object common properties (Assembling button)
Added a first interface to ROS. This version is temporary and will be updated in next release
V-REP V2.6.4 (May 23rd 2012)
Serial port functions: sim.serialOpen, sim.serialClose, sim.serialSend, sim.serialRead and sim.serialCheck.
The serial port functionality is now also operational on the Mac and Linux platforms
Fixed a bug where icons would not appear on systems with an old or non-accelerated graphic card
Added a new integer parameter: sim.intparam_scene_unique_id
V-REP V2.6.3 (April 10th 2012)
First release that is also available on the Linux platform (Ubuntu is preferred). The Mac and Linux versions are however still flagged as early beta releases
Added a new status bar
Reworked the coordinates and transformation dialog, as well as the method of moving object/items
Modified the way objects/items get selected when no key combination is used: objects get selected at mouse button release if the mouse didn't move. This makes it more convenient to navigate with the camera without always losing the object selection state
Added a checker background in the OpenGl-based custom UI edit mode
Added a new video compression library used by V-REP's video recorder, based on the FFmpeg library. Click here for related credits
The player version of V-REP has now been enabled to display the user settings dialog, and the layer selection dialog. Scripts can now also be edited from within the player version of V-REP
V-REP V2.6.2 (March 18th 2012)
Since this release, the concept of "simulator instances" has been abandonned for the concept of "scenes". Functionality basically stays same, but now matches the standard approach. An unlimited number of scenes can now be opened, also in the player version of V-REP
Tree elements in the scene hierarchy can now be drag-and-dropped onto other objects for convenient parent-child relationship building (similar to [Edit > Set parent, keep pose(s)] or [Edit > Set parent-less])
All scene hierarchy icons have been redesigned
All toolbar buttons have been redesigned
The scene hierarchy now also visualizes all opened scenes, and switching between scenes is achieved with a simple click
A new page selector was implemented, allowing to quickly visualize and select from all available pages of a given scene
A new scene selector was implemented, allowing to quickly visualize and select from all available opened scenes
The model browser has been reworked and now uses 24-bit colors for displaying model thumbnails
OpenGl-based custom UIs can now be saved and loaded separately, in a similar way as models are loaded /saved
Added 3 new API functions: simCloseScene, simLoadUI and simSaveUI
V-REP V2.6.1 (February 28th 2012)
First release that is also available on the Mac platform. The Mac release is however still a Beta release where several items are not yet fully supported.
Added an auto-save functionality. It can be turned on/off in the user settings dialog.
Fixed a bug in which V-REP would crash after an undo operation in certain conditions.
Color-coded objects in the dynamic content visualization mode.
Added a parameter to the user settings file (system/usrset.txt) that allows to adjust the GUI font size: guiFontSize_Win
Added a new integer parameter to detect the platform V-REP is running on: sim.intparam_platform
New model: "spring-damper.ttm"
New model: "motorbike.ttm"
V-REP V2.6.0 (January 27th 2012)
This release too underwent heavy internal changes in preparation for support of other platforms (Mac and Linux). Please inform us as soon as possible in case of unexpected behaviour with this release. Thanks!
All dialogs and user interfaces have been completely rewritten/redesigned/reorganized. They now all rely on the Qt framework
The application main loop (i.e. the default main client application) has been simplified and prepared for separate GUI thread functionality. The rendering of the scene is now handled internally. Following functions were added: simGetMainWindow. Following functions were removed: simLaunchSimulator, simEndSimulator, simRenderScene, simHandleWindowMessages, simGetInstanceIndex, simGetVisibleInstanceIndex, simSwitchToInstance, simEmptyScene, simRegisterModuleName and simRegisterEventCallback.
Added following values: sim_message_eventcallback_guipass, sim_message_simulation_start_resume_request, sim_message_simulation_pause_request, sim_message_simulation_stop_request, sim.intparam_qt_version, sim.floatparam_rand. Following value is now also writable: sim.boolparam_console_visible
Adjusted/adapted all V-REP plugins: since this release, plugins should dynamically bind to the V-REP library. The task is simplified with two files distributed with V-REP: "simLib.h" and "simLib.cpp". This reduces compatibility problems linked to working with various compilers. Old plugins should be slightly modified: it is recommended to adjust old plugins in a similar way as was done for the "BubbleRob" plugin project, located in the "c_examples" directory of V-REP's installation directory. If you are having difficulties adjusting your plugin code, please contact us for assistance.
Fixed a bug linked to the click-and-select functionality.
Added several pre-configured simulation settings (e.g. physics engine settings or simulation time step settings). The user can conveniently modify them in the toolbar.
Added an option for turning dialogs semi-transparent when they loose focus.
Added a toolbar button to quickly visualize a scene's dynamic content (enabled during simulation only)
Added a plugin that allows to interface joysticks: simExtJoystick.dll. Like with almost all V-REP plugins, the source code can be requested if not already distributed with V-REP.
V-REP V2.5.12 (December 6th 2011)
This release too underwent heavy internal changes in preparation for support of other platforms (Mac and Linux). Please inform us as soon as possible in case of unexpected behaviour with this release. Thanks!
Improved the undo/redo functionality: undo points are now set 10-20 times faster as in previous releases, which greatly improves scene edition with large scenes.
The undo/redo functionality can now also be accessed via the ctrl-z and ctrl-y keys
Changed the splash screen and the about dialog
Since this release, it is not possible anymore to run several simulations in parallel (in different instances). This limitation greatly simplifies programming of plugins. Most old plugins should still be working, but some might need some simple adjustments. *Refer to the section below for quick instructions of modifications required.
simGetInstanceIndex, simGetVisibleInstanceIndex and simSwitchToInstance are declared deprecated and should not be used anymore.
Simplified and improved the plugin event messages
Removed following event callback messages: sim_message_object_added_or_removed, sim.message_object_selection_changed, sim.message_scene_loaded, sim_message_menu_item_selected, sim_message_eventcallback_objectscaled, sim_message_eventcallback_objectabouttobeerased, sim_message_eventcallback_objecterased and sim_message_eventcallback_objectcreated. The same functionality can be obtained with the improved sim_message_eventcallback_instancepass event callback message. This results in faster loading operation for large scenes, and simplifies programming of plugins. *Refer to the section below for quick instructions of modifications required.
Renamed rendering sensors. They are now called vision sensors, and all related API functions, API constants or references have been renamed. The old API functions and constants are kept operational for backward compatibility.
Added an option to allow for local lights (i.e. lights activated only with flagged cameras). Refer to the light dialog, the camera dialog and the vision sensor properties.
Added a new toolbar button to automatically adjust the main view to the scene, or selected objects
Added a new API function: sim.cameraFitToView (click here for a simulation that illustrates what kind of camera movement can be achieved with that function)
Added a new API function: sim.isHandle.
Added following API functions: sim.persistentDataWrite and sim.persistentDataRead.
Added a new item in the object common properties ("ignored for view-fitting")
New model: "auto fitting camera.ttm"
Removed scene: "youBotDemo.ttt"
*Most old plugins will not need any modification. It is however recommended to adjust the plugin's "simMsg" function in a similar way as was done for the "BubbleRob" plugin project, located in the "c_examples" directory of V-REP's installation directory. If you are having difficulties adjusting your plugin code, please contact us for assistance.
V-REP V2.5.11 (November 13th 2011)
This is a bug fixing release. In version 2.5.10, when opening dialogs, V-REP could crash or freeze. This was fixed
V-REP V2.5.10 (October 21st 2011)
This release underwent heavy internal changes in preparation for support of other platforms (Mac and Linux). Please inform us as soon as possible in case of unexpected behaviour with this release. Thanks!
Removed the object common property visible. This option was a little bit confusing, and now objects can still be made invisible by moving them into a hidden layer
Removed the object common property wireframe
Added a wireframe option in the shape properties
Removed the shape tracing option in order to simplify the shape properties. Shape tracing can still be achieved with appropriate function calls (e.g. see the "tracer" model)
simResetTracing and simHandleTracing API functions were declared deprecated
The shape properties were further simplified by encapsulating the shape calculation structure parameters in a separate dialog
Added new object parameter IDs
Following API functions are now also available from the Lua side: simAddSceneCustomData, simGetSceneCustomData, simAddObjectCustomData and simGetObjectCustomData
New model: "laser pointer.ttm"
New model: "tracer.ttm"
New model: "custom data viewer.ttm"
New model: "reference frame.ttm"
New model: "Accelerometer.ttm"
New model: "GyroSensor.ttm"
V-REP V2.5.9 (September 3rd 2011)
Added support for skyboxes
Added an option to hide all edges in a specific view (view popup menu)
Added an option to display thin or thick edges in a specific view (view popup menu)
Added an option to hide the information and status text when recording a movie
Added two entries in the configuration file ("usrset.txt") that allow to specify the desired resolution for a movie recording. ("movieRecordingResolutionX" and "movieRecordingResolutionY")
Added a light concrete texture to all floors
New model: "5mX5m metallic floor.ttm"
New model: "5mX5m concrete floor.ttm"
New model: "kinect.ttm" (there is already a kinect model for interfacing with the real device. This model is just a simulated device)
New model: "blue sky skybox.ttm"
New model: "felt pen.ttm"
New model: "ant hexapod.ttm"
V-REP V2.5.8 (July 20th 2011)
Improved the sim.addParticleObject function to also support linear and quadratic drag parameters
New API functions: sim.getArrayParam and sim.setArrayParam
Temporarily removed following commands to facilitate a move towards other platforms: simAttachCustomMenu, simRemoveCustomMenu, simCreateCustomToolbar, simSetCustomToolbarState, simRemoveCustomToolbar, simGetWindowMessage, simProcessWindowMessage
Removed the "SimpleCustomClientApplication" project files
Added more fog parameters
Added new int parameters: sim.intparam_infotext_style and sim.intparam_settings
Added new array parameters: sim.arrayparam_gravity, sim.arrayparam_fog, sim.arrayparam_fog_color, sim.arrayparam_background_color1, sim.arrayparam_background_color2 and sim.arrayparam_ambient_light
Added new bool parameters: sim.boolparam_display_enabled, sim.boolparam_infotext_visible, sim.boolparam_statustext_open and sim.boolparam_fog_enabled
Added new object parameter IDs
Added a new vision sensor filter component: blob detection
New joints added to the scene are in dynamic mode by default since this release
Added two entries in the configuration file ("usrset.txt") that allows to correct display problems with specific graphic cards / systems: "renderingSurfaceVShift" and "renderingSurfaceVResize"
New scene: "blobDetectionWithPickAndPlace.ttt"
New scene: "youBotAndHanoiTower.ttt
New model: "fast simulation mode.ttm"
New model: "water surface.ttm"
New model: "ABB IRB 360.ttm"
New model: "Blob detection camera.ttm"
Removed scene: "camFollower.ttt"
Removed scene: "deltaFKDecomposed.ttt"
Removed scene: "lineTracer-nonThreaded.ttt"
Removed scene: "parallelManipulator1.ttt"
Removed scene: "parallelManipulator2.ttt"
Removed scene: "pickAndPlace.ttt"
Removed scene: "mobileRobotDr20.ttt"
Removed scene: "transmission.ttt"
V-REP V2.5.7 (June 25th 2011)
Since this release, models do not required to have a dummy object as base object anymore (any object can be "model base" now). This tremendously improves the way models can be combined, with much less effort (e.g. just select a gripper, then a robot, and click [Edit > Set parent, keep pose(s)]: the resulting model is fully operational)
Reworked almost all models to take advantage of the improved model combination possibility (see here above)
Reworked, actualized and improved the "robot language interpreter integration" tutorial
Added an application and project files that allow retrieving data from the kinect device ('kinectServer')
New tutorial: "External controller tutorial"
New scene: "robotLanguageControl.ttt"
Removed model: "MTA robot.ttm"
New model: "MTB robot.ttm"
New model: "suction pad.ttm"
New model: "lumibot.ttm"
New model: "Standing Bill.ttm"
New model: "kinect.ttm"
V-REP V2.5.6 (June 14th 2011)
Extended the functionality of the functions related to signals. Signals can now be local (to a given simulator instance) or global
Textures can now also be applied using texture coordinate information loaded during an import operation
Added a new integer parameter: sim.intparam_visible_layers
Added a new bool parameter: sim.boolparam_shape_textures_are_visible
New scene: "controlTypeExamples.ttt"
Bug correction (crash with spherical joints, and joints involved in loop closure with the ODE engine)
V-REP V2.5.5 (June 3rd 2011)
New API commands to build transformation interpolations: sim.getRotationAxis and sim.rotateAroundAxis
New API command to launch executables: sim.launchExecutable
New API command to read the force/torque along/about a joint's z-axis: simJointGetForce
New model: "signal monitor.ttm"
When simulation stops, then the initial parenting will try to be restored
Added a new integer parameter: sim.intparam_dynamic_engine
Added a new recordable data stream for graphs: "Joints: force or torque"
Number of active lights not limited to 8 anymore (provided that the GPU also supports more than 8 lights)
Folders now also appear and are clickable in the lower part of the model browser window
V-REP V2.5.4 (April 22nd 2011)
Completely reworked user manual, running in web-browser now. Fixed all broken links.
New V-REP plugin "simExtWii.dll" that exports 4 new commands to interact with a wiimote device: simWii.start, simWii.stop, simWii.set and simWii.get
Multiple simultaneous script edition is now suppored
New API command to apply non-central forces: sim.addForce
New API command to temporarily forbid thread switches: sim.setThreadAutomaticSwitch
2 API commands were removed: simGetInEditionScript and simCloseEditionScript
New data stream type: simulation pass execution time
Switched to the most recent Bullet engine V2.78beta (rev2338)
New model: "Working Bill.ttm"
Several new models of panes for industrial manufacturing cells
New model: "5mX5m wooden floor.ttm"
New model: "Sitting Bill.ttm"
Removed scene "hovercraft.ttt"
Removed scene "trackedRobots.ttt"
New scene: "inverseKinematicsOf144DoFManipulator.ttt"
V-REP V2.5.3 (March 20th 2011)
Extended the functionality of the sim.unpackInt32Table and sim.unpackFloatTable functions
Extended the functionality of the sim.adjustView function
New API command to control the show state of an auxiliary console window: sim.auxiliaryConsoleShow
New API commands to set and retrieve various values linked to objects (will be extended on a regular basis): sim.getObjectInt32Param, sim.setObjectInt32Param, sim.getObjectFloatParam, sim.setObjectFloatParam, sim.getObjectStringParam and sim.setObjectStringParam
New V-REP plugin "simExtCam.dll" (using "escape.dll") that exports 4 new commands to acquire webcam images: simCam.start, simCam.stop, simCam.info and simCam.grab
New model: "plugin enumerator.ttm"
New model: "Mesa SR4000.ttm"
New model: "Snake.ttm"
New model: "Walking Bill.ttm"
New model: "wiimote.ttm" (the associated required plugin will be shipped in next release)
New model: "Barrett Hand.ttm"
New model: "K-Junior.ttm"
New model: "webcam.ttm"
Corrected a bug where sim.handleModule would generate an additional unexpected event (sim_message_eventcallback_modulehandle)
Model names in the model browser are now displayed on 2 lines if required
New models: conveyor belt models were added that perform more efficiently
Updated the conveyor belt tutorial with an alternative modeling method that performs more efficiently
Removed scene "mapBuilding.ttt"
New scene "environmentMapping.ttt"
New scene "BarrettHandPickAndPlace.ttt"
Added a mechanism to adjust the Bullet collision margin overall, or on an object-basis
V-REP V2.5.2 (February 22nd 2011)
Heightfields are now supported and can be imported from *.tga, *.csv or *.txt files
New API command to create heightfields: sim.createHeightfieldShape
New API commands to handle views and floating views: sim.floatingViewAdd, sim.floatingViewRemove and sim.adjustView
New model: 10m x 10m terrain.ttm
Updated the quadricopter model by adding a floor and a front camera
Updated the helicopter model by adding a front camera
V-REP V2.5.1 (February 10th 2011)
Corrected bug in API function sim.getObjectOrientation (when relativeTo argument was not -1, results were wrong)
New model: ABB IRB 140.ttm
New model: Omnidirectional Platform.ttm
New model: 1.0 x 0.2 conveyor.ttm
New model: Quadricopter.ttm
New model: helicopter.ttm
Extended the functionality of following 2 API functions: sim.getScriptSimulationParameter & sim.setScriptSimulationParameter (a parameter can now be a string containing any byte value)
Changed the default value of last argument of API function simMoveToJointPositions. Default is now 1.
New tutorial "Conveyor belt/caterpillar"
Corrected a bug in the propeller.ttm and Air jet.ttm models
V-REP V2.5.0 (January 16th 2011)
New API commands to import/export meshes: sim.importMesh and sim.exportMesh
New API commands to create shapes and to extract the mesh of a shape: sim.createMeshShape, sim.createPureShape and sim.getShapeMesh
New API command to create joints: sim.createJoint
API commands simGetShapeVertex and simGetShapeTriangle are declared deprecated
Scene hierarchy now always contains a double-clickable "World" object. This replaces the environment toolbar button which was removed
New API constant: sim.boolparam_scene_and_model_load_messages
New API constants for banner support
New model: object locator.ttm
Updated the default main client application vrep.exe, and the example main client application project
Extended the lifetime of license keys (key version x.y.z now works for all V-REP versions up to x.y+1.z-1)
V-REP V2.4.15 (December 20th 2010)
New API command to set the maximum force/torque a joint can exert: sim.setJointForce
New API commands to create and handle auxiliary console windows: sim.auxiliaryConsoleOpen, sim.auxiliaryConsolePrint, sim.auxiliaryConsoleClose
The Lua extension library LuaSocket is included in the distribution
Corrected a small bug that would affect the icons appearance on some graphic cards
New scene: socketAndTubeCommunicationExample.ttt
V-REP V2.4.14 (December 11th 2010)
Removed an OpenGL instruction that caused opengl driver crashes on some graphic cards (including VMWare's openGL driver "vmwogl32.dll")
V-REP V2.4.13 (December 8th 2010)
Warning message appears now when a scene was not saved (when leaving or discarding a scene)
Improved and corrected the BubbleRob tutorial
New dongle drivers
New API commands to handle particles: sim.addParticleObject, sim.removeParticleObject and sim.addParticleObjectItem
New API command to retrieve information on contacts: sim.getContactInfo
New model: contact display.ttm
New model: AirJet.ttm
New model: Propeller.ttm
New model: Fire.ttm
New model: smoke.ttm
New model: Wheel.ttm
New model: Caster wheel.ttm
New model: Omniwheel 45deg A.ttm
New model: Omniwheel 45deg B.ttm
New model: Hokuyo URG 04LX UG01.ttm
New scene: hovercraft.ttt
V-REP V2.4.12 (October 30th 2010)
Corrected a small bug in the sim.moveToJointPositions API command applied to joints in dynamic mode
New API commands: sim.setShapeColor, sim.resetDynamicObject and sim.setJointMode
New model: YouBot.ttm
New model: e-puck.ttm
New scene: youBotDemo.ttt
New scene: e-puckDemo.ttt
V-REP V2.4.11 (October 13th 2010)
Dual physics engine support: next to the Bullet physics library, the Open Dynamics Engine (ODE) is now also supported
New model: Asti.ttm
New Model: Robbie.ttm
All models and scenes have been checked/adjusted for dual physics engine support
New scene: ImageProcessingExample.ttt
V-REP V2.4.10
Minor bug fixes
V-REP V2.4.9
New API commands: sim.setObjectSpecialProperty and sim.getObjectSpecialProperty
Model visibility can now also be overridden
New option "ignored during path planning" for the "collidable" and "measurable" property
Improved path edition capabilities
Bug fix in the path planning module
New model: path following human
New model: path planning and following human
V-REP V2.4.8
Edge following is enabled by default in the edge edit mode
New demo scene: Katana robot with twisted cable simulation
New demo scene: ABB Fanta can challenge
New demo scene: practical path planning
New API commands: sim.setExplicitHandling and sim.getExplicitHandling
Improved object manipulation and snapping to grid
Automatic rendering order calculation for translucid shapes
New OpenGl-based custom UI option: "display only when associated object is selected"
New edit menu item: "Replace selected objects with a copy of last selected object"
New model browser window with drag-and-drop functionality
New models organized in a model library
New option for proximity sensors: Occlusion check
New option for ray-type proximity sensors: randomized detection
Option to override specific properties for whole models
New API commands: sim.setModelProperty and sim.getModelProperty
V-REP V2.4.7
New API command: sim.getStringParam
Option to create primitive shapes with selected triangles in the triangle edit mode
Improved demo scene: Welding robot with flexible cable simulation
New tutorial: Inverse kinematics
New tutorial: Importing and preparing rigid bodies
New tutorial: Hexapod
New tutorial: Robot language interpreter integration
V-REP V2.4.6
Various minor bug fixes
New demo scene: Roller-Walker.ttt
V-REP V2.4.5
Improved sim.sendData and sim.receiveData commands
New API command: sim.getVelocity
New API command: sim.addForceAndTorque
New demo scene: ACM_R5H.ttt
New demo scene: Hexapod.ttt
Bug correction in simGetPosition, simSetPosition, simGetOrientation and simSetOrientation commands
Antialiasing option for edges. Disabled by default
V-REP V2.4.4
Various minor bug fixes
V-REP V2.4.3
Texture support for shapes and OpenGl-based custom UIs. Textures can be static or dynamic
V-REP V2.4.2
First public release in March 2010
|