|

Joint properties
The joint properties are part of the scene object properties dialog, which is located at [Tools > Scene object properties]. You can also open the dialog with a double-click on an object icon in the scene hierarchy, or with a click on its toolbar button:

[Scene object properties toolbar button]
In the scene object properties dialog, click the Joint button to display the joint dialog (the Joint button only appears if the last selection is a joint). The dialog displays the settings and parameters of the last selected joint. If more than one joint is selected, then some parameters can be copied from the last selected joint to the other selected joints (Apply to selection-buttons. Be aware that this however only has an effect between joints of same type or mode):
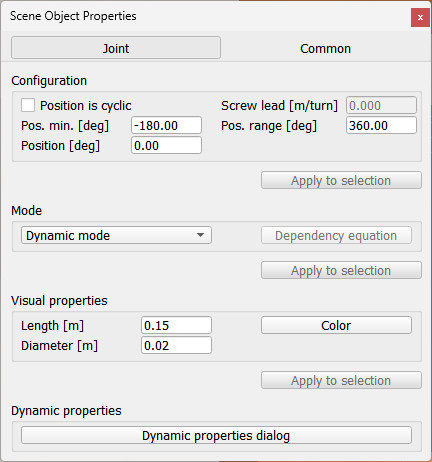
[Joint dialog]
Position is cyclic: indicates whether the angular joint position is cyclic (varies between -180 and +180 degrees without limitation). Only revolute joints can be cyclic
Screw lead: the z-axis displacement per turn. This property becomes available only with the Revolute/Screw-type of joint, when the Position is cyclic-checkbox is left unchecked and the joint is kinematic
Position minimum: the minimum allowed value of a non-cyclic revolute joint, a screw, or a prismatic joint
Position range: the variation range of a non-cyclic revolute joint, a screw or a prismatic joint. A position of such a joint is limited between Position minimum and Position minimum+Position range
Position: linear/angular joint position
Mode: a joint can be in kinematic, dependent, or dynamic mode
Dependency equation: if the joint is in dependent mode, then a linear equation can be specified that links the joint to another one. The values in this section of the dialog are all indicated in meters or radians
Length: length of the joint. Has no functional meaning
Diameter: diameter of the joint. Has no functional meaning
Color: allows adjusting the color of the joint
Dynamic properties dialog: toggles the joint dynamics properties dialog. The joint dynamics dialog allows to adjust a joint's dynamic properties
|