|

Proximity sensor properties
The proximity sensor properties are part of the scene object properties dialog, which is located at [Tools > Scene object properties]. You can also open the dialog with a double-click on an object icon in the scene hierarchy, or with a click on its toolbar button:

[Scene object properties toolbar button]
In the scene object properties dialog, click the Proximity sensor button to display the proximity sensor dialog (the Proximity sensor button only appears if the last selection is a proximity sensor). The dialog displays the settings and parameters of the last selected proximity sensor. If more than one proximity sensor is selected, then some parameters can be copied from the last selected proximity sensor to the other selected proximity sensors (Apply to selection-buttons):
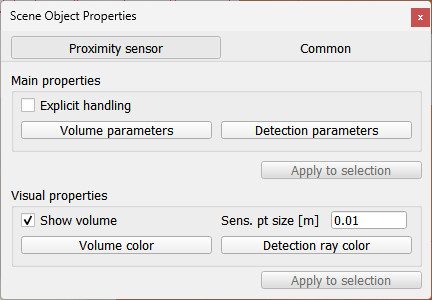
[Proximity sensor dialog]
Explicit handling: indicates whether the sensor should be explicitly handled. If checked, the sensor will not be handled when sim.handleProximitySensor(sim.handle_all_except_explicit) is called, but only if sim.handleProximitySensor(sim.handle_all) or sim.handleProximitySensor(proximitySensorHandle) is called. This is useful if the user wishes to handle the sensor in a child script rather than in the main script (if not checked the sensor will be handled twice, once when sim.handleProximitySensor(sim.handle_all_except_explicit) is called in the main script, and once when sim.handleProximitySensor(proximitySensorHandle) is called in the child script). Refer also to the section on explicit and non-explicit calls.
Volume parameters: Toggles the proximity sensor volume dialog. That dialog allows to customize a proximity sensor's detection volume.
Detection parameters: opens the proximity sensor detection parameter dialog. That dialog allows to customize various detection parameters.
Volume: displays or hides the detection volume.
Sensing point size: the size of the sensing point. This has no effect on calculations (the sensing point, even if displayed big, is always considered as a point).
Volume color: allows adjusting the color of the sensor's volume.
Detection ray color: allows adjusting the color of the sensor's detection ray.
|